Complex & Intelligent Systems ( IF 5.0 ) Pub Date : 2022-08-10 , DOI: 10.1007/s40747-022-00831-5 Zhexiong Shang , Zhigang Shen
|
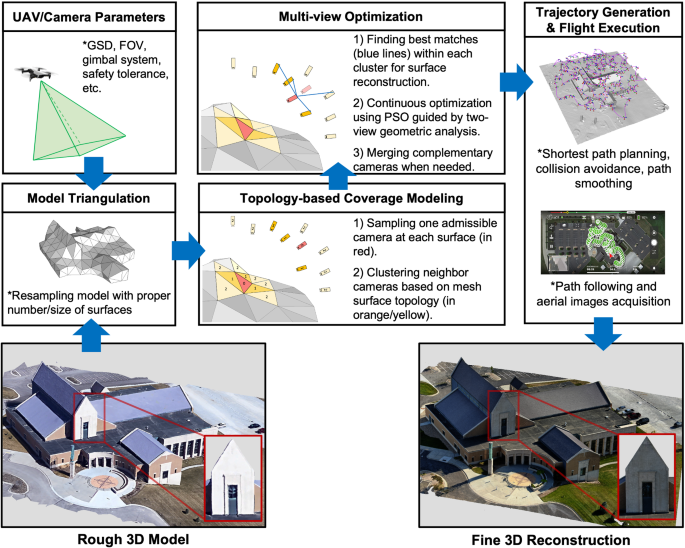
This paper introduces a new UAV path planning method for creating high-quality 3D reconstruction models of large and complex structures. The core of the new method is incorporating the topology information of the surveyed 3D structure to decompose the multi-view stereo path planning into a collection of overlapped view optimization problems that can be processed in parallel. Different from the existing state-of-the-arts that recursively select the vantage camera views, the new method iteratively resamples all nearby cameras (i.e., positions/orientations) together and achieves a substantial reduction in computation cost while improving reconstruction quality. The new approach also provides a higher-level automation function that facilitates field implementations by eliminating the need for redundant camera initialization as in existing studies. Validations are provided by measuring the variance between the reconstructions to the ground truth models. Results from three synthetic case studies and one real-world application are presented to demonstrate the improved performance. The new method is expected to be instrumental in expanding the adoption of UAV-based multi-view stereo 3D reconstruction of large and complex structures.
中文翻译:
基于拓扑的无人机路径规划用于复杂结构的多视角立体 3D 重建
本文介绍了一种新的无人机路径规划方法,用于创建大型复杂结构的高质量 3D 重建模型。新方法的核心是结合所测量的3D结构的拓扑信息,将多视图立体路径规划分解为可以并行处理的重叠视图优化问题的集合。与递归选择有利摄像机视图的现有技术不同,新方法迭代地重新采样所有附近的摄像机(即位置/方向),并在提高重建质量的同时实现计算成本的大幅降低。新方法还提供了更高级别的自动化功能,通过消除现有研究中对冗余相机初始化的需要来促进现场实施。通过测量与地面实况模型的重建之间的差异来提供验证。展示了三个综合案例研究和一个实际应用的结果,以证明改进的性能。预计这种新方法将有助于扩大对大型复杂结构的基于无人机的多视图立体 3D 重建的采用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号