Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2019-12-23 , DOI: 10.1016/j.sna.2019.111808 Zhixin Yang , Xiaoqin Zhou , Hu Huang
|
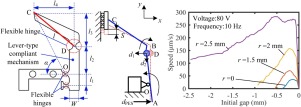
Pre-loading the driving compliant mechanism is an effective method to improve the self-locking ability of the parasitic motion principle (PMP) piezoelectric actuators, but it may also change the motion mode from the normal PMP to the self-deformation driving (SDD). When the self-deformation is distributed along the whole driving compliant mechanism, the structure design and analysis would be difficult. To facilitate the design and analysis of SDD piezoelectric actuators, following our previous study, an additional flexible hinge was introduced to the lever-amplification compliant mechanism, and thus the self-deformation would be concentrated in the introduced flexible hinge. The maximum one-step displacement of the proposed SDD piezoelectric actuator was analyzed by pseudo-rigid-body method, and the effects of the radius of the introduced right-circular flexible hinge on its compliance were theoretically analyzed. Output performances of the SDD actuator under various radiuses were characterized by experiments. The results showed that the introduced flexible hinge could not only increase the peak motion speed but also increase the adjustable initial gap, i.e. reducing the assembly requirements. Furthermore, when reducing the initial gap to be over the one corresponding to the peak motion speed, the backward motion would become remarkable; however, it would also bring an important advantage, improving the self-locking ability (also the loading capability). These results are expected to provide useful information for the design and application of SDD piezoelectric actuators.
中文翻译:
自变形驱动(SDD)压电执行器输出性能的结构依赖性
预加载驱动顺应机构是提高寄生运动原理(PMP)压电执行器自锁能力的有效方法,但也可能将运动模式从正常PMP更改为自变形驱动(SDD) 。当自变形沿整个驾驶顺应性机制分布时,结构设计和分析将很困难。为了方便SDD压电执行器的设计和分析,在我们之前的研究之后,向杠杆放大顺应机构引入了附加的柔性铰链,因此自变形将集中在引入的柔性铰链中。通过拟刚体方法分析了所提出的SDD压电致动器的最大单步位移,并从理论上分析了所引入的右圆形柔性铰链的半径对其顺应性的影响。通过实验对SDD执行器在各种半径下的输出性能进行了表征。结果表明,引入的柔性铰链不仅可以提高峰值运动速度,而且可以增加可调节的初始间隙,即降低了组装要求。此外,当将初始间隙减小到超过与峰值运动速度相对应的间隙时,后退运动将变得显着。但是,这也将带来重要的优势,即提高自锁能力(以及负载能力)。这些结果有望为SDD压电执行器的设计和应用提供有用的信息。










































 京公网安备 11010802027423号
京公网安备 11010802027423号