Nature Machine Intelligence ( IF 18.8 ) Pub Date : 2019-12-10 , DOI: 10.1038/s42256-019-0123-3 Alessandro Di Nuovo , James L. McClelland
|
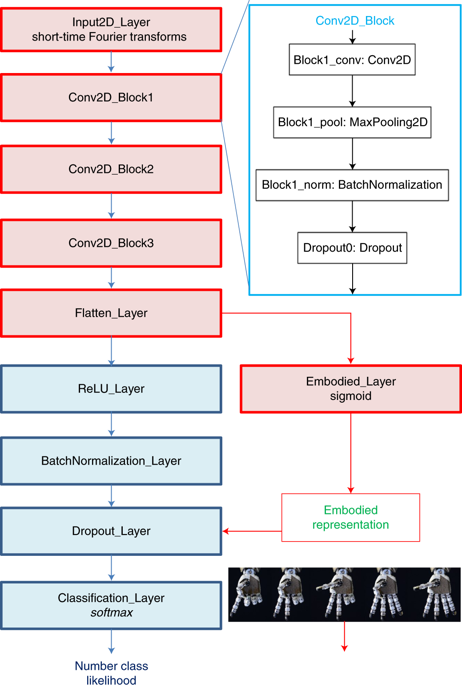
Number knowledge can be boosted initially by embodied strategies such as the use of fingers. This Article explores the perceptual process of grounding number symbols in artificial agents, particularly the iCub robot—a child-like humanoid with fully functional, five-fingered hands. It studies the application of convolutional neural network models in the context of cognitive developmental robotics, where the training information is likely to be gradually acquired while operating, rather than being abundant and fully available as in many machine learning scenarios. The experimental analyses show increased efficiency of the training and similarities with studies in developmental psychology. Indeed, the proprioceptive information from the robot hands can improve accuracy in the recognition of spoken digits by supporting a quicker creation of a uniform number line. In conclusion, these findings reveal a novel way for the humanization of artificial training strategies, where the embodiment can make the robot’s learning more efficient and understandable for humans.
中文翻译:
在类似儿童的机器人中发展数字位数的知识
最初可以通过具体的策略(例如使用手指)来增强数字知识。本文探讨了在人工代理(尤其是iCub机器人)中将数字符号接地的感知过程,iCub机器人是一种像孩子的类人动物,具有五只手的完整功能。它研究了认知发展机器人技术中卷积神经网络模型的应用,在这种情况下,培训信息很可能在运行时逐渐获取,而不像许多机器学习场景中那样丰富和完全可用。实验分析表明,培训效率的提高以及与发展心理学研究的相似性。的确,通过支持更快地创建统一的数字线,来自机器人手的本体感受信息可以提高语音数字识别的准确性。总之,这些发现揭示了一种用于人工训练策略的人性化的新颖方法,其中该实施例可以使机器人的学习对人类而言更加有效和易于理解。










































 京公网安备 11010802027423号
京公网安备 11010802027423号