当前位置:
X-MOL 学术
›
ISPRS J. Photogramm. Remote Sens.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
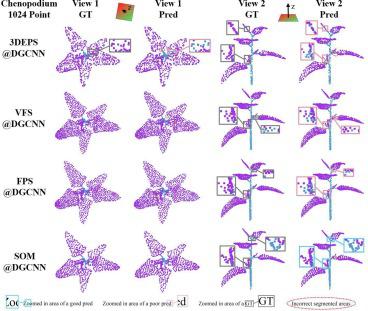
Unsupervised shape-aware SOM down-sampling for plant point clouds
ISPRS Journal of Photogrammetry and Remote Sensing ( IF 12.7 ) Pub Date : 2024-04-10 , DOI: 10.1016/j.isprsjprs.2024.03.024 Dawei Li , Zhaoyi Zhou , Yongchang Wei
ISPRS Journal of Photogrammetry and Remote Sensing ( IF 12.7 ) Pub Date : 2024-04-10 , DOI: 10.1016/j.isprsjprs.2024.03.024 Dawei Li , Zhaoyi Zhou , Yongchang Wei
|
Observation of the external 3D shape/structure and some measurable phenotypic traits is of great significance to screening excellent varieties and improving crop yield in agriculture. The dense crop point clouds scanned by 3D sensors not only may include imaging noise, but also contain a large number of redundant points that will put high burden on storage and slow down the speed of algorithm for point cloud segmentation, classification, and other following processing steps. To reduce the complexity of point cloud data and meanwhile better represent the structure under limited resources, this paper presents a new Self-organizing Map (SOM)-based down-sampling strategy that is tailored for plant (or plant-like) point clouds. Our SOM-based sampling works in a purely unsupervised manner and precisely controls the number of points after down-sampling. It obtains shape-aware sampling on irregular plant point clouds by automatically encoding preliminary semantics to different organ types (e.g., stems are sampled as “lines”, and leaves are sampled as folded curved shaped in “surfaces”). Extensive experiments on a multi-species plant dataset were conducted using several popular deep 3D-segmentation networks as the downstream task unit, respectively. The segmentation performance of the SOM-processed dataset outperformed several other mainstream down-sampling strategies. Our SOM strategy with 1D neuron layer can be further generalized to 2D and 3D versions, and also can be extended to a more adaptive framework that automatically picks the most suitable version of SOM for each corresponding local shape component. The proposed strategy also showed good potential in serving different applications including point cloud skeleton extraction, crop main stem length measurement; and presented satisfactory results on point cloud datasets from other domains, indicating its high applicability and good data domain adaptation.
中文翻译:

植物点云的无监督形状感知 SOM 下采样
观察外部3D形状/结构和一些可测量的表型性状对于筛选优良品种和提高农业产量具有重要意义。 3D传感器扫描的密集作物点云不仅可能包含成像噪声,而且还包含大量冗余点,这会给存储带来很大负担,并减慢点云分割、分类和其他后续处理算法的速度脚步。为了降低点云数据的复杂性,同时在有限资源下更好地表示结构,本文提出了一种新的基于自组织映射(SOM)的下采样策略,该策略专为植物(或类植物)点云量身定制。我们基于 SOM 的采样以纯粹无监督的方式工作,并精确控制下采样后的点数。它通过自动编码不同器官类型的初步语义来获得不规则植物点云的形状感知采样(例如,茎被采样为“线”,叶子被采样为“表面”中的折叠弯曲形状)。分别使用几种流行的深度 3D 分割网络作为下游任务单元,对多物种植物数据集进行了广泛的实验。 SOM 处理的数据集的分割性能优于其他几种主流下采样策略。我们具有 1D 神经元层的 SOM 策略可以进一步推广到 2D 和 3D 版本,并且还可以扩展到更具适应性的框架,自动为每个相应的局部形状组件选择最合适的 SOM 版本。所提出的策略在点云骨架提取、作物主茎长度测量等不同应用中也显示出良好的潜力;并在其他领域的点云数据集上取得了令人满意的结果,表明其具有较高的适用性和良好的数据领域适应性。
更新日期:2024-04-10
中文翻译:
植物点云的无监督形状感知 SOM 下采样
观察外部3D形状/结构和一些可测量的表型性状对于筛选优良品种和提高农业产量具有重要意义。 3D传感器扫描的密集作物点云不仅可能包含成像噪声,而且还包含大量冗余点,这会给存储带来很大负担,并减慢点云分割、分类和其他后续处理算法的速度脚步。为了降低点云数据的复杂性,同时在有限资源下更好地表示结构,本文提出了一种新的基于自组织映射(SOM)的下采样策略,该策略专为植物(或类植物)点云量身定制。我们基于 SOM 的采样以纯粹无监督的方式工作,并精确控制下采样后的点数。它通过自动编码不同器官类型的初步语义来获得不规则植物点云的形状感知采样(例如,茎被采样为“线”,叶子被采样为“表面”中的折叠弯曲形状)。分别使用几种流行的深度 3D 分割网络作为下游任务单元,对多物种植物数据集进行了广泛的实验。 SOM 处理的数据集的分割性能优于其他几种主流下采样策略。我们具有 1D 神经元层的 SOM 策略可以进一步推广到 2D 和 3D 版本,并且还可以扩展到更具适应性的框架,自动为每个相应的局部形状组件选择最合适的 SOM 版本。所提出的策略在点云骨架提取、作物主茎长度测量等不同应用中也显示出良好的潜力;并在其他领域的点云数据集上取得了令人满意的结果,表明其具有较高的适用性和良好的数据领域适应性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号