Precision Agriculture ( IF 6.2 ) Pub Date : 2024-02-05 , DOI: 10.1007/s11119-024-10119-y Bin Zhang , Yuyang Xia , Rongrong Wang , Yong Wang , Chenghai Yin , Meng Fu , Wei Fu
|
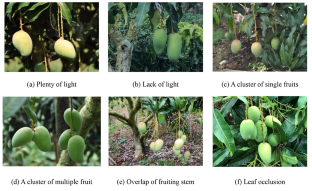
Due to the fact that the color of mango peel is similar to that of leaf, and there are many fruits on one stem, it is difficult to locate the picking point when using robots to pick fresh mango in the natural environment. A multi-task learning method named YOLOMS was proposed for mango recognition and rapid location of main stem picking points. Firstly, the backbone network of YOLOv5s was optimized and improved by using the RepVGG structure. The loss function of original YOLOv5s was improved by introducing the loss function of Focal-EIoU. The improved model could accurately identify mango and fruit stem in complex environment without decreasing reasoning speed. Secondly, the subtask of mango stem segmentation was added to the improved YOLOv5s model, and the YOLOMS multi-task model was constructed to obtain the location and semantic information of the fruit stem. Finally, the strategies of main fruit stem recognition and picking point location were put forward to realize the picking point location of the whole cluster mango. The images of mangoes on trees in natural environment were collected to test the performance of the YOLOMS model. The test results showed that the mAP and Recall of mango fruit and stem target detection by YOLOMS model were 82.42% and 85.64%, respectively, and the MIoU of stem semantic segmentation reached to 82.26%. The recognition accuracy of mangoes was 92.19%, the success rate of stem picking location was 89.84%, and the average location time was 58.4 ms. Compared with the target detection models of Yolov4, Yolov5s, Yolov7-tiny and the target segmentation models of U-net, PSPNet and DeepLab_v3+, the improved YOLOMS model had significantly better performance, which could quickly and accurately locate the picking point. This research provides technical support for mango picking robot to recognize the fruit and locate the picking point.
中文翻译:
基于 YOLOMS 多任务 CNN 模型的芒果识别和茎上采摘点位置
由于芒果皮的颜色与叶子相似,且一茎上果实较多,在自然环境下使用机器人采摘新鲜芒果时,很难找到采摘点。提出了一种用于芒果识别和主茎采摘点快速定位的多任务学习方法YOLOMS。首先,利用RepVGG结构对YOLOv5s的主干网络进行了优化和改进。通过引入Focal-EIoU的损失函数,对原有YOLOv5s的损失函数进行了改进。改进后的模型能够在复杂环境下准确识别芒果和果茎,且不会降低推理速度。其次,在改进的YOLOv5s模型中添加芒果茎分割子任务,构建YOLOMS多任务模型,获取果茎的位置和语义信息。最后提出主果茎识别和采摘点定位策略,实现整串芒果的采摘点定位。收集自然环境中树上芒果的图像来测试YOLOMS模型的性能。测试结果表明,YOLOMS模型对芒果果实和茎目标检测的mAP和Recall分别为82.42%和85.64%,茎语义分割的MIoU达到82.26%。芒果识别准确率为92.19%,采梗定位成功率为89.84%,平均定位时间为58.4 ms。与Yolov4、Yolov5s、Yolov7-tiny的目标检测模型以及U-net、PSPNet和DeepLab_v3+的目标分割模型相比,改进后的YOLOMS模型具有明显更好的性能,能够快速准确地定位拾取点。该研究为芒果采摘机器人识别果实并定位采摘点提供技术支撑。


























 京公网安备 11010802027423号
京公网安备 11010802027423号