Scientific Reports ( IF 3.9 ) Pub Date : 2024-01-08 , DOI: 10.1038/s41598-023-50899-3 Ayush Aggarwal , Rustam Stolkin , Naresh Marturi
|
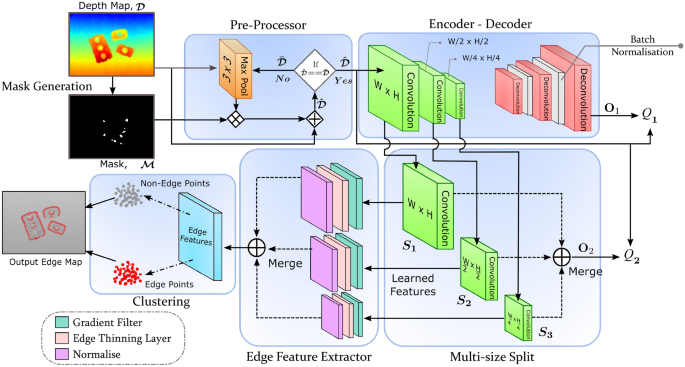
3D edge features, which represent the boundaries between different objects or surfaces in a 3D scene, are crucial for many computer vision tasks, including object recognition, tracking, and segmentation. They also have numerous real-world applications in the field of robotics, such as vision-guided grasping and manipulation of objects. To extract these features in the noisy real-world depth data, reliable 3D edge detectors are indispensable. However, currently available 3D edge detection methods are either highly parameterized or require ground truth labelling, which makes them challenging to use for practical applications. To this extent, we present a new 3D edge detection approach using unsupervised classification. Our method learns features from depth maps at three different scales using an encoder–decoder network, from which edge-specific features are extracted. These edge features are then clustered using learning to classify each point as an edge or not. The proposed method has two key benefits. First, it eliminates the need for manual fine-tuning of data-specific hyper-parameters and automatically selects threshold values for edge classification. Second, the method does not require any labelled training data, unlike many state-of-the-art methods that require supervised training with extensive hand-labelled datasets. The proposed method is evaluated on five benchmark datasets with single and multi-object scenes, and compared with four state-of-the-art edge detection methods from the literature. Results demonstrate that the proposed method achieves competitive performance, despite not using any labelled data or relying on hand-tuning of key parameters.
中文翻译:
基于无监督学习的深度图中 3D 边缘检测方法
3D 边缘特征表示 3D 场景中不同对象或表面之间的边界,对于许多计算机视觉任务(包括对象识别、跟踪和分割)至关重要。它们在机器人技术领域也有许多实际应用,例如视觉引导抓取和操纵物体。为了在嘈杂的真实世界深度数据中提取这些特征,可靠的 3D 边缘检测器是必不可少的。然而,目前可用的 3D 边缘检测方法要么是高度参数化的,要么需要地面实况标记,这使得它们在实际应用中的使用具有挑战性。为此,我们提出了一种使用无监督分类的新型 3D 边缘检测方法。我们的方法使用编码器-解码器网络从三种不同尺度的深度图中学习特征,从中提取边缘特定的特征。然后使用学习对这些边缘特征进行聚类,以将每个点分类为边缘或不分类。所提出的方法有两个主要优点。首先,它无需手动微调特定于数据的超参数,并自动选择阈值进行边缘分类。其次,该方法不需要任何标记的训练数据,这与许多最先进的方法不同,这些方法需要使用大量手动标记的数据集进行监督训练。在具有单目标和多目标场景的五个基准数据集上评估了所提出的方法,并与文献中四种最先进的边缘检测方法进行了比较。结果表明,尽管没有使用任何标记数据或依赖于关键参数的手动调整,但所提出的方法实现了有竞争力的性能。






















































 京公网安备 11010802027423号
京公网安备 11010802027423号