Complex & Intelligent Systems ( IF 4.6 ) Pub Date : 2023-06-09 , DOI: 10.1007/s40747-023-01114-3 Jiajun Xu , Byeong-Geon Kim , Yuzhen Lu , Kyoung-Su Park
|
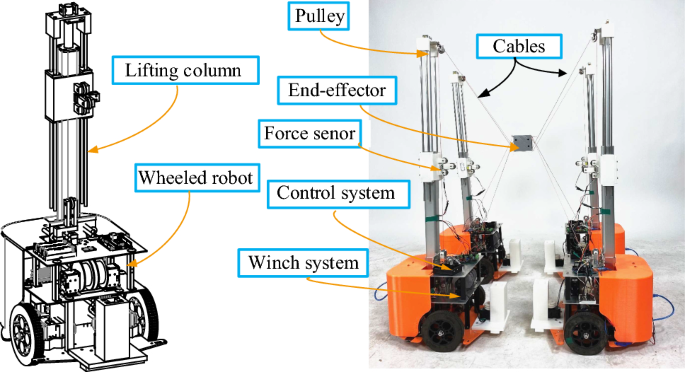
Mobile cable-driven parallel robots (MCDPRs) is a novel concept of cable-driven parallel robots (CDPRs) developed by mounting several mobile bases to discrete the conventional fixed frame. However, the additional mobile bases introduce more degree-of-freedom (DoF), thereby causing the kinematic redundancy. Moreover, mobile bases are susceptible to disturbances causing inconsistent performance. Hence, path planning of MCDPRs becomes a challenging issue due to various internal and external constraints involved. In this article, an optimization-based path planning method is proposed for MCDPRs in highly constrained environments with considering kinematic stability. The proposed approach quickly generates feasible paths for coupled mobile bases by using the developed multi-agent rapidly exploring random tree (MA-RRT). In this process, the tree can share information through the heuristics method to optimize the path, and the adaptive sampling strategy is thus proposed to increase the tree growth efficiency by self-adjusting sampling space. Moreover, the developed dynamic control checking method (DCC) is integrated with MA-RRT to smooth the path and the kinodynamic constraints of mobile bases can be satisfied. To generate the path of the end-effector, two performance metrics are designed considering the kinematic and stability of the MCDPR. Based on the performance metrics, the grid-based search method is developed to generate the path for the end-effector. Finally, the convincing performance of the proposed method is revealed through the dynamic simulation software (CoppeliaSim) and real-world experiments based on a self-built MCDPR prototype.
中文翻译:
高度受限环境下移动电缆驱动并联机器人基于最优采样的路径规划
移动式电缆驱动并联机器人(MCDPRs)是一种新颖的电缆驱动并联机器人(CDPRs)概念,通过安装多个移动底座来离散传统的固定框架。然而,额外的移动底座引入了更多的自由度 (DoF),从而导致运动学冗余。此外,移动基站容易受到导致性能不一致的干扰的影响。因此,由于涉及各种内部和外部约束,MCDPR 的路径规划成为一个具有挑战性的问题。在本文中,在考虑运动稳定性的情况下,针对高度受限环境中的 MCDPR 提出了一种基于优化的路径规划方法。所提出的方法通过使用开发的多代理快速探索随机树 (MA-RRT) 快速生成耦合移动基站的可行路径。在这个过程中,树可以通过启发式方法共享信息来优化路径,因此提出了自适应采样策略,通过自调整采样空间来提高树的生长效率。此外,所开发的动态控制检查方法 (DCC) 与 MA-RRT 集成以平滑路径,并且可以满足移动基站的运动动力学约束。为了生成末端执行器的路径,考虑了 MCDPR 的运动学和稳定性,设计了两个性能指标。基于性能指标,开发了基于网格的搜索方法来生成末端执行器的路径。最后,通过动态仿真软件 (CoppeliaSim) 和基于自建 MCDPR 原型的真实世界实验,揭示了所提出方法令人信服的性能。






















































 京公网安备 11010802027423号
京公网安备 11010802027423号