Precision Agriculture ( IF 5.4 ) Pub Date : 2023-05-11 , DOI: 10.1007/s11119-023-10026-8 Dong-Wook Kim , Sang Jin Jeong , Won Suk Lee , Heesup Yun , Yong Suk Chung , Young-Seok Kwon , Hak-Jin Kim
|
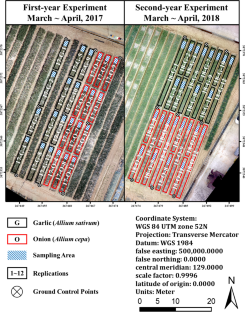
Canopy coverage-based crop growth monitoring is highly dependent on the performance of crop segmentation algorithms. Under field conditions, crop segmentation for unmanned aerial vehicle (UAV) imagery should be sophisticated considering geometric distortion of images by wind and illumination variations. Under Korean cultivation conditions, a plastic mulch used to restrict weeds and prevent cold weather damage increases the complexity of the image background. In particular, on-site monitoring of onion and garlic growth has been limited by their morphology because they have long narrow leaves. The ultimate goal of this study was to quantify the growth parameters of onion and garlic at multiple growth stages using red, green, and blue (RGB) imagery obtained with UAVs. Canopy coverage and plant height were used as predictor variables to develop mathematical models to estimate the fresh weights of onion and garlic. The use of a CIE L*a*b* color space and mean shift (MS) algorithm enhanced the extraction of the canopy coverage of onion and garlic from complex backgrounds, including plastic mulch, soil, and shadows under varying illumination conditions. Multiple linear regression models consisting of the a* band-based vegetation fraction (VF) and structure from motion (SfM)-based plant height (PH) fitted the fresh weight data of onion and garlic well with high coefficients of determination (R2) ranging from 0.82 to 0.92. The validation results showed an almost 1:1 slope with highly linear relationships (R2 > 0.82) between the onion and garlic fresh weights obtained with the UAV RGB imagery and actual fresh weights, confirming that the UAV-RGB imagery based on the use of the a*band and PH can be used to quantify the spatial and temporal variability of onion and garlic growth parameters during the growing season.
中文翻译:
CIE L*a*b* 颜色空间和无人机 RGB 图像的基于区域的作物分割对大田洋葱和大蒜的生长监测
基于冠层覆盖的作物生长监测高度依赖于作物分割算法的性能。在野外条件下,考虑到风和光照变化导致的图像几何失真,无人驾驶飞行器 (UAV) 图像的作物分割应该很复杂。在韩国的栽培条件下,用于限制杂草和防止寒冷天气损害的塑料覆盖物增加了图像背景的复杂性。特别是,洋葱和大蒜生长的现场监测受到其形态的限制,因为它们的叶子又长又窄。本研究的最终目标是使用无人机获得的红、绿、蓝 (RGB) 图像量化洋葱和大蒜在多个生长阶段的生长参数。冠层覆盖率和株高被用作预测变量来开发数学模型来估计洋葱和大蒜的鲜重。使用 CIE L*a*b* 颜色空间和均值偏移 (MS) 算法增强了从复杂背景(包括不同光照条件下的塑料覆盖物、土壤和阴影)中提取洋葱和大蒜的冠层覆盖率。由基于 a* 带的植被分数 (VF) 和基于运动结构 (SfM) 的植物高度 (PH) 组成的多元线性回归模型很好地拟合了洋葱和大蒜的鲜重数据,具有高决定系数 (R 包括塑料覆盖物、土壤和不同光照条件下的阴影。由基于 a* 带的植被分数 (VF) 和基于运动结构 (SfM) 的植物高度 (PH) 组成的多元线性回归模型很好地拟合了洋葱和大蒜的鲜重数据,具有高决定系数 (R 包括塑料覆盖物、土壤和不同光照条件下的阴影。由基于 a* 带的植被分数 (VF) 和基于运动结构 (SfM) 的植物高度 (PH) 组成的多元线性回归模型很好地拟合了洋葱和大蒜的鲜重数据,具有高决定系数 (R2 ) 范围从 0.82 到 0.92。 验证结果显示,使用无人机 RGB 图像获得的洋葱和大蒜鲜重与实际鲜重之间几乎为1:1 的斜率具有高度线性关系 (R 2 > 0.82),证实了基于使用的无人机-RGB 图像a* 波段和 PH 值可用于量化生长季节期间洋葱和大蒜生长参数的空间和时间变异性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号