International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2023-03-23 , DOI: 10.1016/j.ijmecsci.2023.108352 Soyeon Park , Jongwoo Kim , Jieun Park , Jessica Burgner-Kahrs , Gunwoo Noh
|
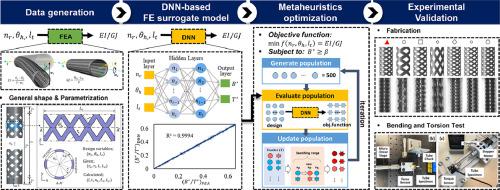
Concentric-tube robots for minimally invasive surgery pose a potential risk of tissue rupture because of the structural instabilities caused by high value of bending-to-torsional-stiffness ratio (EI/GJ). In this study, a novel optimization method based on metaheuristic optimization accelerated by a deep neural network (DNN)-based surrogate model to obtain optimized pattern parameters is presented. The method minimizes EI/GJ while conforming to the minimum compliance constraints and geometric restrictions. The proposed optimization process utilizes a DNN trained using 855 datasets generated by finite element analysis that cover the pattern design parameter space. The pattern design parameters were derived from topology optimization. The results demonstrate that the proposed optimization method yielded pattern designs that outperformed previous designs within a reasonable time frame (less than 900 s) without requiring manual parametric study or sensitivity analysis.
中文翻译:
使用 DNN 元启发式优化设计管状机器人的模式
用于微创手术的同心管机器人存在组织破裂的潜在风险,因为高弯曲扭转刚度比 (EI/GJ) 值会导致结构不稳定。在这项研究中,提出了一种基于元启发式优化的新型优化方法,该方法由基于深度神经网络 (DNN) 的代理模型加速以获得优化模式参数。该方法最小化EI/GJ同时符合最低合规约束和几何限制。所提出的优化过程利用了一个 DNN,该 DNN 使用 855 个数据集进行训练,这些数据集由覆盖模式设计参数空间的有限元分析生成。图案设计参数源自拓扑优化。结果表明,所提出的优化方法产生的图案设计在合理的时间范围内(少于 900 秒)优于以前的设计,而无需手动参数研究或灵敏度分析。










































 京公网安备 11010802027423号
京公网安备 11010802027423号