Precision Agriculture ( IF 5.4 ) Pub Date : 2023-03-16 , DOI: 10.1007/s11119-023-09999-3 Rohit V. Nanavati , Yanhua Meng , Matthew Coombes , Cunjia Liu
|
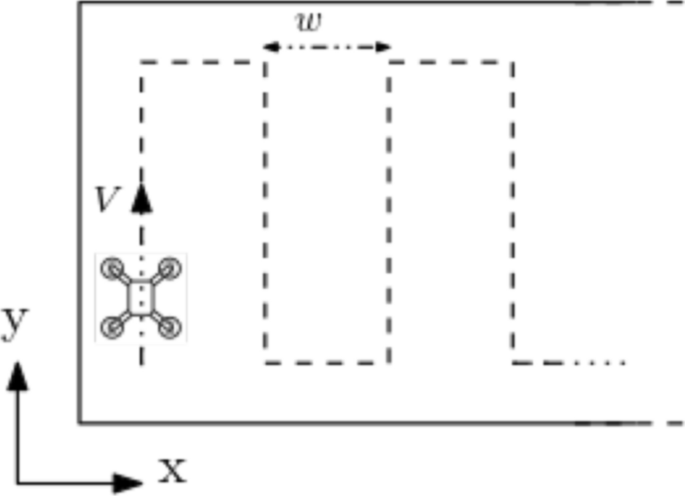
Unmanned aerial vehicle (UAV) based crop spraying has become a popular alternative in the field of precision agriculture. One of the key goals of UAV based spraying is achieving spray coverage that is as uniform as possible to ensure maximum spray efficacy. Most of the existing studies in the literature focus on analysing the effects of spraying parameters on the uniformity of coverage distribution using experimental studies. However, in this work, we propose a novel generalized data-driven optimal path-planning framework aimed at finding the optimal operational flight parameters (flight speed and pass widths) for a lawnmower coverage path plan to meet the specified spray coverage rate while ensuring the uniformity. The framework takes a spray distribution model as an input and computes the optimal operational parameters for the coverage path plan to minimize coverage non-uniformity without making any assumptions on the UAV type. Furthermore, we also propose a neural network structure using Gaussian kernel neurons to design the spraying model using experimental data. The neural network structure makes no assumption about the type of UAV, onboard nozzle placement, or the flight parameters. The accuracy of the modelling solution only depends on the quality of the training data. In other words, higher diversity of the training data in terms of the flight and spraying parameters would result in a modelling solution that is more representative of the spraying distribution and consequently improve the quality of the operational parameters obtained from the proposed optimization framework. In this work, we present a case study to demonstrate the use case and test the performance of the proposed framework via simulation and experiments using the DJI AGRAS-T10 drone. The results showed that the optimal pass-width solutions for low forward speeds were similar to optimizing the positioning of the nozzles on a boom sprayer to achieve uniform coverage. Whereas, at high speeds, the pass-width was comparatively higher as the spread of the effective coverage over each pass increased. A discussion contextualized in the case study is provided to highlight the salient features and limitations of the proposed framework.
中文翻译:
广义数据驱动的最优路径规划框架,用于使用农作物喷洒无人机的均匀覆盖任务
基于无人机 (UAV) 的农作物喷洒已成为精准农业领域的热门替代方案。基于无人机的喷洒的主要目标之一是实现尽可能均匀的喷洒覆盖,以确保最大的喷洒效果。文献中的大多数现有研究都集中在通过实验研究分析喷洒参数对覆盖分布均匀性的影响。然而,在这项工作中,我们提出了一种新颖的广义数据驱动的最佳路径规划框架,旨在为割草机覆盖路径计划找到最佳操作飞行参数(飞行速度和通过宽度)以满足指定的喷雾覆盖率,同时确保均匀性。该框架将喷雾分布模型作为输入,并计算覆盖路径计划的最佳操作参数,以在不对无人机类型做出任何假设的情况下最大限度地减少覆盖不均匀性。此外,我们还提出了一种使用高斯核神经元的神经网络结构,以使用实验数据设计喷洒模型。神经网络结构不假设无人机的类型、机载喷嘴位置或飞行参数。建模解决方案的准确性仅取决于训练数据的质量。换句话说,飞行和喷洒参数方面训练数据的更高多样性将产生更能代表喷洒分布的建模解决方案,从而提高从建议的优化框架获得的操作参数的质量。在这项工作中,我们提出了一个案例研究,以使用 DJI AGRAS-T10 无人机通过仿真和实验来演示用例并测试所提出框架的性能。结果表明,低前进速度的最佳通过宽度解决方案类似于优化喷杆喷雾机上的喷嘴定位以实现均匀覆盖。然而,在高速下,随着每次通过的有效覆盖范围的扩大,通过宽度相对较高。










































 京公网安备 11010802027423号
京公网安备 11010802027423号