Friction ( IF 6.3 ) Pub Date : 2022-12-22 , DOI: 10.1007/s40544-022-0688-4 Tianze Hao , Huaping Xiao , Shuhai Liu , Yibo Liu
|
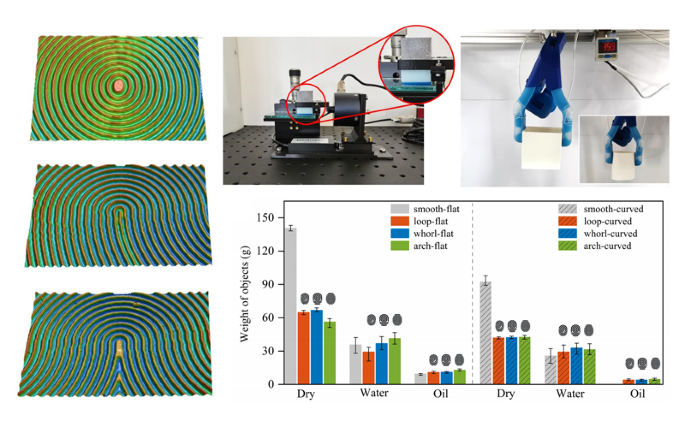
The core capabilities of soft grippers/soft robotic hands are grasping and manipulation. At present, most related research often improves the grasping and manipulation performance by structural design. When soft grippers rely on compressive force and friction to achieve grasping, the influence of the surface microstructure is also significant. Three types of fingerprint-inspired textures with relatively regular patterns were prepared on a silicone rubber surface via mold casting by imitating the three basic shapes of fingerprint patterns (i.e., whorls, loops, and arches). Tribological experiments and tip pinch tests were performed using fingerprint-like silicone rubber films rubbing against glass in dry and lubricated conditions to examine their performance. In addition to the textured surface, a smooth silicone rubber surface was used as a control. The results indicated that the coefficient of friction (COF) of the smooth surface was much higher than that of films with fingerprint-like textures in dry and water-lubricated conditions. The surface with fingerprint-inspired textures achieved a higher COF in oil-lubricated conditions. Adding the fingerprint-like films to the soft robotic fingers improved the tip pinch gripping performance of the soft robotic hand in lubricated conditions. This study demonstrated that the surface texture design provided an effective method for regulating the grasping capability of humanoid robotic hands.
中文翻译:
受指纹启发的表面纹理可增强软机械手在润滑条件下的尖端捏合性能
软抓手/软机器人手的核心能力是抓取和操纵。目前,大多数相关研究往往通过结构设计来提高抓取和操纵性能。当软质夹持器依靠压缩力和摩擦力实现抓取时,表面微观结构的影响也很显着。通过模仿指纹图案的三种基本形状(即螺纹、环形和拱形),通过模具铸造在硅橡胶表面制备了三种具有相对规则图案的指纹启发纹理。在干燥和润滑的条件下,使用类似指纹的硅橡胶薄膜摩擦玻璃进行摩擦学实验和尖端夹紧测试,以检查它们的性能。除了有质感的表面,光滑的硅橡胶表面用作对照。结果表明,在干燥和水润滑条件下,光滑表面的摩擦系数 (COF) 远高于具有指纹状纹理的薄膜。具有指纹纹理的表面在油润滑条件下实现了更高的摩擦系数。将类似指纹的薄膜添加到软机器人手指中,可以改善软机器人手在润滑条件下的尖端夹紧抓握性能。本研究表明,表面纹理设计为调节仿人机器人手的抓握能力提供了一种有效的方法。具有指纹纹理的表面在油润滑条件下实现了更高的摩擦系数。将类似指纹的薄膜添加到软机器人手指中,可以改善软机器人手在润滑条件下的尖端夹紧抓握性能。本研究表明,表面纹理设计为调节仿人机器人手的抓握能力提供了一种有效的方法。具有指纹纹理的表面在油润滑条件下实现了更高的摩擦系数。将类似指纹的薄膜添加到软机器人手指中,可以改善软机器人手在润滑条件下的尖端夹紧抓握性能。本研究表明,表面纹理设计为调节仿人机器人手的抓握能力提供了一种有效的方法。










































 京公网安备 11010802027423号
京公网安备 11010802027423号