IRBM ( IF 4.8 ) Pub Date : 2022-12-15 , DOI: 10.1016/j.irbm.2022.100746 Manuel Abbas , Majd Saleh , Joaquim Prud'Homm , Fabien Lemoine , Dominique Somme , Régine Le Bouquin Jeannès
|
Objective
this paper presents an innovative graphical user interface to visualize the attitude of a sensing device in a three-dimensional space, serving a wide-range of medical applications.
Material and methods
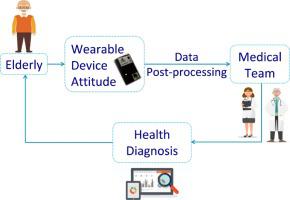
based on inertial measurement units (IMU) or on magnetic, angular rate and gravity (MARG) sensors, a processing unit provides Euler angles using a sensor fusion technique to display the orientation of the device relative to the Earth frame in real-time. The device is schematized by linking six polygonal regions, and is subject to sequential rotations by updating the graph each 350 ms. We conduct comparative studies between the two sensing devices, i.e. IMUs and MARGs, as well as two orientation filters, namely Madgwick's algorithm and Mahony's algorithm.
Results
the accuracy of the system is reported as a function of (i) the sampling frequency, (ii) the sensing unit, and (iii) the orientation filter, following two elderly care applications, namely fall risk assessment and body posture monitoring. The experiments are conducted using public datasets. The corresponding results show that Madgwick's algorithm is best suited for low sampling rates, whereas MARG sensors are best suited for the detection of postural transitions.
Conclusion
this paper addresses the different aspects and discusses the limitations of attitude estimation systems, which are important tools to help clinicians in their diagnosis.
中文翻译:
设备姿态和实时 3D 可视化:老年护理界面
客观的
本文介绍了一种创新的图形用户界面,可以在三维空间中可视化传感设备的姿态,服务于广泛的医疗应用。
材料与方法
基于惯性测量单元 (IMU) 或磁、角速率和重力 (MARG) 传感器,处理单元使用传感器融合技术提供欧拉角,以实时显示设备相对于地球坐标系的方向。该设备通过连接六个多边形区域进行图解化,并通过每 350 毫秒更新一次图形来进行顺序旋转。我们对两种传感设备(即IMU 和 MARG)以及两种方向滤波器(即 Madgwick 算法和 Mahony 算法)进行了比较研究。
结果
该系统的准确性被报告为 (i) 采样频率、(ii) 传感单元和 (iii) 方向过滤器的函数,遵循两个老年护理应用,即跌倒风险评估和身体姿势监测。实验是使用公共数据集进行的。相应的结果表明,Madgwick 的算法最适合低采样率,而 MARG 传感器最适合姿势转换的检测。
结论
本文阐述了不同方面并讨论了态度估计系统的局限性,这是帮助临床医生进行诊断的重要工具。


























 京公网安备 11010802027423号
京公网安备 11010802027423号