Robotics and Computer-Integrated Manufacturing ( IF 9.1 ) Pub Date : 2022-11-24 , DOI: 10.1016/j.rcim.2022.102501 Zenghui Xie , Fugui Xie , Xin-Jun Liu , Jinsong Wang , Hongyu Su
|
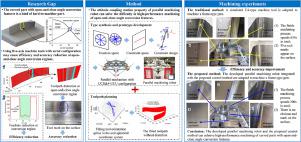
The curved part with open-and-close angle conversion features is a kind of well-known difficult-to-machine part. Using traditional five-axis serial machine tools (SMTs) may cause efficiency and accuracy reduction at open-and-close angle conversion regions because of the singular points in their orientation workspace. How to achieve high-efficiency and high-precision machining of this kind of curved part is a challenging issue in the field. In order to solve this problem, a parallel machining robot (PMR) with five degrees of freedom (DoFs) is developed. Accordingly, the attitude coupling adjustment mechanism of the developed PMR is disclosed, which indicated that a small change of the tool orientation will never lead to a large range motion of the driving limbs. Thus the robot has the potential to pass through open-and-close angle conversion regions smoothly. In order to take full use of the advantages of the developed PMR in attitude adjustment, a control method is proposed by fitting tool orientation spline in unit spherical coordinate system. On this basis, toolpath planning and machining experiments are carried out to verify the performance of the developed PMR and the proposed control method when machining parts with open-and-close angle conversion features. Experimental results demonstrate that the developed machining robot integrated with the proposed control method can improve the machining efficiency and accuracy significantly when compared with the SMT. This proves that the attitude coupling motion property of PMRs can solve the difficulty in high-performance machining of open-and-close angle conversion features. The findings of this study fundamentally provide a feasible way to overcome the abnormal phenomena when machining curved parts with open-and-close angle conversion features.
中文翻译:
用于曲面零件高性能加工的并联加工机器人及其控制方法
具有开闭角度转换特性的曲面零件是一种众所周知的难加工零件。使用传统的五轴串行机床 (SMT) 可能会导致开闭角转换区域的效率和精度降低,因为它们的方向工作空间中存在奇异点。如何实现此类曲面零件的高效、高精度加工是该领域具有挑战性的课题。为了解决这个问题,开发了具有五个自由度 (DoF) 的并行加工机器人 (PMR)。相应地,开发的PMR的姿态耦合调节机构被公开,这表明工具方向的微小变化永远不会导致驱动肢的大范围运动。因此,机器人有可能顺利通过开闭角转换区域。为充分利用研制的PMR在姿态调整方面的优势,提出了一种在单位球坐标系下拟合工具定向样条的控制方法。在此基础上,进行了刀具路径规划和加工实验,以验证所开发的PMR的性能和所提出的控制方法在加工具有开闭角转换特征的零件时的性能。实验结果表明,与SMT相比,所开发的加工机器人结合所提出的控制方法可以显着提高加工效率和精度。这证明PMR的姿态耦合运动特性可以解决开闭角转换特征高性能加工的难题。该研究结果从根本上为克服加工具有开闭角转换特征的曲面零件时出现的异常现象提供了一种可行的方法。










































 京公网安备 11010802027423号
京公网安备 11010802027423号