Precision Agriculture ( IF 5.4 ) Pub Date : 2022-11-01 , DOI: 10.1007/s11119-022-09973-5 Yonghyun Park , Hyuck-Joo Kim , Hyoung Il Son
|
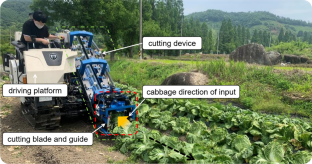
This study proposes a backstepping control-based attitude control system for cutting devices to improve the performance of Korean cabbage harvesters. If the Korean cabbage is not cut at an optimal cutting position, the quality of the cabbage deteriorates because of head damage. However, attitude control of the harvester body has limitations in maintaining an optimal cutting position. In this study, a mechanism was designed to independently control cutting devices depending on the variety of crops during harvesting. However, the environment of Korean cabbage fields is irregular and nonlinear, making it difficult to predict the gradient changes. Therefore, a backstepping nonlinear control method was used to reduce the load on the hydraulic system caused by the dynamic characteristics of the harvester. A field test was conducted on a Korean cabbage field to validate the proposed controller. A total of 60 heads were harvested for the experiment, and a score was calculated to evaluate the cabbage cutting surface quantitatively. The proposed method yielded a cutting performance of 86.6%. The attitude maintenance performance was validated by measuring the change in attitude during harvesting. The root mean square errors (RMSEs) of the pitch angle and cutting height position were 0.73° and 11.20 mm and the mean absolute errors (MAEs) were 0.53° and 8.97 mm. The results confirmed that the cutting angle and height were maintained within ± 2° and ± 25 mm. The proposed backstepping-based attitude control system enabled accurate harvesting of Korean cabbage, which is expected to improve the harvest success rate.
中文翻译:
使用反步控制的韩国卷心菜收割机新姿态控制
本研究提出了一种基于反步控制的切割装置姿态控制系统,以提高韩国卷心菜收割机的性能。如果大白菜没有在最佳切割位置切割,则由于头部损伤,大白菜的质量会下降。然而,收割机主体的姿态控制在保持最佳切割位置方面存在局限性。在这项研究中,设计了一种机制,可以在收获过程中根据作物的种类独立控制切割设备。然而,韩国白菜地的环境是不规则和非线性的,使得梯度变化难以预测。因此,采用反步非线性控制方法来降低收割机动态特性对液压系统的负荷。在韩国卷心菜田上进行了现场测试,以验证所提出的控制器。实验共收获60个头,计算分数以定量评价卷心菜切面。所提出的方法产生了 86.6% 的切削性能。通过测量收获期间的姿态变化来验证姿态维持性能。俯仰角和切削高度位置的均方根误差(RMSEs)分别为0.73°和11.20 mm,平均绝对误差(MAEs)分别为0.53°和8.97 mm。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。实验共收获60个头,计算分数以定量评价卷心菜切面。所提出的方法产生了 86.6% 的切削性能。通过测量收获期间的姿态变化来验证姿态维持性能。俯仰角和切削高度位置的均方根误差(RMSEs)分别为0.73°和11.20 mm,平均绝对误差(MAEs)分别为0.53°和8.97 mm。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。实验共收获60个头,计算分数以定量评价卷心菜切面。所提出的方法产生了 86.6% 的切削性能。通过测量收获期间的姿态变化来验证姿态维持性能。俯仰角和切削高度位置的均方根误差(RMSEs)分别为0.73°和11.20 mm,平均绝对误差(MAEs)分别为0.53°和8.97 mm。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。所提出的方法产生了 86.6% 的切削性能。通过测量收获期间的姿态变化来验证姿态维持性能。俯仰角和切削高度位置的均方根误差(RMSEs)分别为0.73°和11.20 mm,平均绝对误差(MAEs)分别为0.53°和8.97 mm。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。所提出的方法产生了 86.6% 的切削性能。通过测量收获期间的姿态变化来验证姿态维持性能。俯仰角和切削高度位置的均方根误差(RMSEs)分别为0.73°和11.20 mm,平均绝对误差(MAEs)分别为0.53°和8.97 mm。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。20 毫米,平均绝对误差 (MAE) 为 0.53° 和 8.97 毫米。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。20 毫米,平均绝对误差 (MAE) 为 0.53° 和 8.97 毫米。结果证实,切割角度和高度保持在±2°和±25 mm范围内。所提出的基于反推的姿态控制系统能够准确收获大白菜,有望提高收获成功率。










































 京公网安备 11010802027423号
京公网安备 11010802027423号