Complex & Intelligent Systems ( IF 5.0 ) Pub Date : 2022-09-23 , DOI: 10.1007/s40747-022-00864-w Xin Zhang , Ran Shi , Zijun Zhu , Ying Quan
|
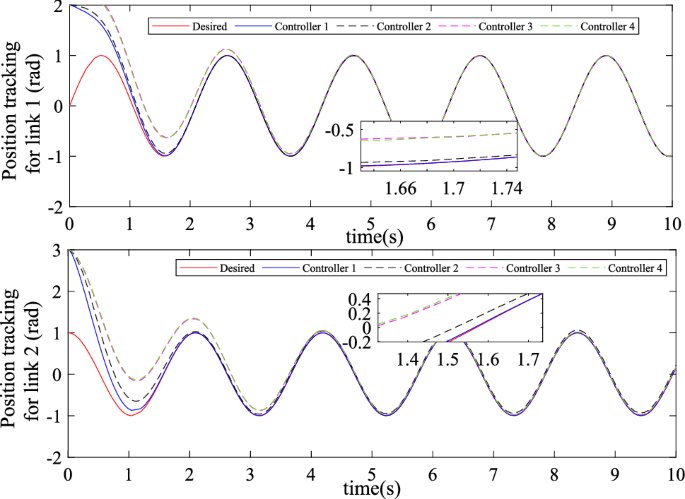
In this paper, an adaptive fixed-time controller is raised for the manipulator system with uncertain disturbances to boost the rate and precision of its trajectory tracking and solve the convergence time dependence on the system's initial conditions. First, a nonsingular fixed-time sliding mode (SM) surface and a reaching law based on an arctangent function are constructed to enhance the control scheme performance. Second, the upper bound is difficult to obtain because of the uncertainty of the disturbance. The disturbance upper bound is estimated by adaptive techniques, which do not require a priori knowledge about the upper bound and effectively inhibit the effect of disturbance on the system. Finally, the fixed-time convergence of the states is analyzed by rigorous theoretical proof, and the validity of the presented control scheme is demonstrated by simulation.
中文翻译:
机器人系统轨迹跟踪的自适应非奇异固定时间滑模控制
针对不确定扰动的机械臂系统,本文提出了一种自适应固定时间控制器,以提高其轨迹跟踪的速度和精度,解决收敛时间对系统初始条件的依赖性。首先,构造非奇异固定时间滑模(SM)表面和基于反正切函数的趋近律,以提高控制方案的性能。其次,由于扰动的不确定性,上界难以获得。扰动上界采用自适应技术估计,不需要关于上界的先验知识,有效抑制了扰动对系统的影响。最后,通过严格的理论证明分析了状态的固定时间收敛性,








































 京公网安备 11010802027423号
京公网安备 11010802027423号