Microsystem Technologies ( IF 1.6 ) Pub Date : 2022-09-19 , DOI: 10.1007/s00542-022-05382-w Jae Hwan Bong , Sunwoong Choi , Jin Hong , Shinsuk Park
|
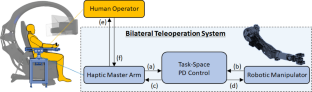
With the advancement of robot and artificial intelligence technologies, various robot platforms have been introduced to operate in environments where humans cannot easily access. However, imperfect artificial intelligence and ethical issues make it challenging to deploy fully automated robots in harsh environments on behalf of humans. As an alternative to full automation, a human-in-the-loop control system is commonly used to control the robot in the remote site. Bilateral teleoperation allows to deliver the haptic information from the robot in the distance to the human operator. In this study, we propose a novel haptic master arm mapping the human arm motion to the robot arm motion. The master arm has three degrees of freedom equipped with motors to provide the human operator with force feedback. The feedback force is computed based on the virtual spring and damper connecting the endpoints of the master arm and the robot arm. The three-dimensional force is proportional to the position and velocity differences between the two endpoints. The performance of the developed master arm was evaluated by using a robot manipulator in the simulator. The results show that the bilateral teleoperation by using the developed haptic device overperforms the unilateral teleoperation without force feedback in terms of task-space position control with a smaller position error. The results also show that with the developed haptic device the magnitude of the feedback force can be properly adjusted by reflecting the sizes and weights of the human and the robots.
中文翻译:
用于机器人操纵双边遥操作的力反馈触觉接口
随着机器人和人工智能技术的进步,各种机器人平台被引入到人类无法轻易进入的环境中运行。然而,不完善的人工智能和伦理问题使得代表人类在恶劣环境中部署全自动机器人具有挑战性。作为全自动化的替代方案,人在环控制系统通常用于控制远程站点的机器人。双边远程操作允许将触觉信息从远处的机器人传递给人类操作员。在这项研究中,我们提出了一种新颖的触觉主臂,将人类手臂运动映射到机器人手臂运动。主臂具有三个自由度,配备电机,为人类操作员提供力反馈。基于连接主臂和机器人臂端点的虚拟弹簧和阻尼器计算反馈力。三维力与两个端点之间的位置和速度差成正比。通过在模拟器中使用机器人机械手评估开发的主臂的性能。结果表明,在任务空间位置控制方面,使用开发的触觉设备进行双边遥操作优于无力反馈的单边遥操作,且位置误差更小。结果还表明,使用开发的触觉设备,可以通过反映人和机器人的大小和重量来适当地调整反馈力的大小。三维力与两个端点之间的位置和速度差成正比。通过在模拟器中使用机器人机械手评估开发的主臂的性能。结果表明,在任务空间位置控制方面,使用开发的触觉设备进行双边遥操作优于无力反馈的单边遥操作,且位置误差更小。结果还表明,使用开发的触觉设备,可以通过反映人和机器人的大小和重量来适当地调整反馈力的大小。三维力与两个端点之间的位置和速度差成正比。通过在模拟器中使用机器人机械手评估开发的主臂的性能。结果表明,在任务空间位置控制方面,使用开发的触觉设备进行双边遥操作优于无力反馈的单边遥操作,且位置误差更小。结果还表明,使用开发的触觉设备,可以通过反映人和机器人的大小和重量来适当地调整反馈力的大小。结果表明,在任务空间位置控制方面,使用开发的触觉设备进行双边遥操作优于无力反馈的单边遥操作,且位置误差更小。结果还表明,使用开发的触觉设备,可以通过反映人和机器人的大小和重量来适当地调整反馈力的大小。结果表明,在任务空间位置控制方面,使用开发的触觉设备进行双边遥操作优于无力反馈的单边遥操作,且位置误差更小。结果还表明,使用开发的触觉设备,可以通过反映人和机器人的大小和重量来适当地调整反馈力的大小。










































 京公网安备 11010802027423号
京公网安备 11010802027423号