当前位置:
X-MOL 学术
›
ACS Appl. Mater. Interfaces
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Aligned Magnetic Nanocomposites for Modularized and Recyclable Soft Microrobots
ACS Applied Materials & Interfaces ( IF 8.3 ) Pub Date : 2022-09-13 , DOI: 10.1021/acsami.2c13108 Langquan Shui 1 , Ke Ni 1 , Zhengzhi Wang 1, 2, 3
ACS Applied Materials & Interfaces ( IF 8.3 ) Pub Date : 2022-09-13 , DOI: 10.1021/acsami.2c13108 Langquan Shui 1 , Ke Ni 1 , Zhengzhi Wang 1, 2, 3
Affiliation
|
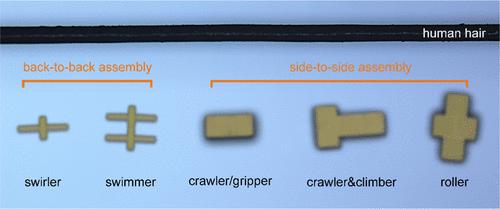
Creating reconfigurable and recyclable soft microrobots that can execute multimodal locomotion has been a challenge due to the difficulties in material processing and structure engineering at a small scale. Here, we propose a facile technique to manufacture diverse soft microrobots (∼100 μm in all dimensions) by mechanically assembling modular magnetic microactuators into different three-dimensional (3D) configurations. The module is composed of a cubic micropillar supported on a square substrate, both made of elastomer matrix embedded with prealigned magnetic nanoparticle chains. By directionally bonding the sides or backs of identical modules together, we demonstrate that assemblies from only two and four modules can execute a wide range of locomotion, including gripping microscale objects, crawling and crossing solid obstacles, swimming within narrow and tortuous microchannels, and rolling along flat and inclined surfaces, upon applying proper magnetic fields. The assembled microrobots can additionally perform pick–transfer–place and cargo-release tasks at the microscale. More importantly, like the game of block-building, the microrobots can be disassembled back to separate modules and then reassembled to other configurations as demanded. The present study not only provides a versatile and economic manufacturing technique for reconfigurable and recyclable soft microrobots, enabling unlimited design space for diverse robotic locomotion from limited materials and module structures, but also extends the functionality and dexterity of existing soft robots to microscale that should facilitate practical applications at such small scale.
中文翻译:

用于模块化和可回收软微型机器人的对齐磁性纳米复合材料
由于小规模材料加工和结构工程的困难,创建可以执行多模式运动的可重构和可回收的软微型机器人一直是一项挑战。在这里,我们提出了一种简便的技术,通过将模块化磁性微执行器机械组装成不同的三维 (3D) 配置来制造各种软微型机器人(所有尺寸约为 100 μm)。该模块由支撑在方形基板上的立方微柱组成,两者均由嵌入预先排列的磁性纳米粒子链的弹性体基质制成。通过将相同模块的侧面或背面定向粘合在一起,我们证明了仅由两个和四个模块组成的组件可以执行广泛的运动,包括抓取微型物体、爬行和穿越固体障碍物,在施加适当的磁场后,在狭窄而曲折的微通道中游泳,并沿着平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。并在施加适当的磁场后沿平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。并在施加适当的磁场后沿平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。
更新日期:2022-09-13
中文翻译:
用于模块化和可回收软微型机器人的对齐磁性纳米复合材料
由于小规模材料加工和结构工程的困难,创建可以执行多模式运动的可重构和可回收的软微型机器人一直是一项挑战。在这里,我们提出了一种简便的技术,通过将模块化磁性微执行器机械组装成不同的三维 (3D) 配置来制造各种软微型机器人(所有尺寸约为 100 μm)。该模块由支撑在方形基板上的立方微柱组成,两者均由嵌入预先排列的磁性纳米粒子链的弹性体基质制成。通过将相同模块的侧面或背面定向粘合在一起,我们证明了仅由两个和四个模块组成的组件可以执行广泛的运动,包括抓取微型物体、爬行和穿越固体障碍物,在施加适当的磁场后,在狭窄而曲折的微通道中游泳,并沿着平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。并在施加适当的磁场后沿平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。并在施加适当的磁场后沿平坦和倾斜的表面滚动。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。组装好的微型机器人还可以在微尺度上执行拾取-转移-放置和货物释放任务。更重要的是,就像积木游戏一样,微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。微型机器人可以拆卸回单独的模块,然后根据需要重新组装成其他配置。本研究不仅为可重构和可回收的软体微型机器人提供了一种通用且经济的制造技术,为有限的材料和模块结构的各种机器人运动提供了无限的设计空间,而且还将现有软体机器人的功能和灵巧性扩展到了微尺度,这应该有助于如此小规模的实际应用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号