EURASIP Journal on Wireless Communications and Networking ( IF 2.3 ) Pub Date : 2022-09-05 , DOI: 10.1186/s13638-022-02156-w Huiying Chen , Renwei Liu , Ping He , Zuxin Li
|
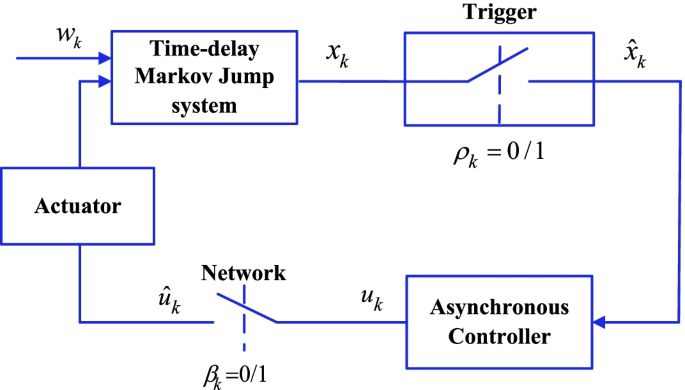
This paper is concerned with asynchronous dissipative control for a class of networked time-delay Markov jump systems with event-triggered scheme and packet dropouts. To reduce communication consumption, an event-triggered transmission scheme is introduced. The phenomenon of packet dropout during the communication between the controller and the actuator is described by the Bernoulli model. The designed dissipative controller is asynchronous with the physical plant, which is described by a hidden Markov model. Based on a mode-dependent Lyapunov–Krasovskii function, a sufficient condition for the closed-loop control system to be stochastically stable and strictly \((\mu ,\vartheta ,\upsilon ){-}\gamma\)-dissipative is obtained. Furthermore, the design of dissipative controller is simplified by using matrix scaling and slack matrix techniques. Finally, a robotic arm system is used as an example to verify the effectiveness of our proposed design method.
中文翻译:
具有事件触发方案和丢包的网络延时马尔可夫跳跃系统的异步耗散控制
本文关注一类具有事件触发方案和数据包丢失的网络时延马尔可夫跳跃系统的异步耗散控制。为了减少通信消耗,引入了事件触发传输方案。Bernoulli模型描述了控制器和执行器之间通信过程中的丢包现象。所设计的耗散控制器与物理设备异步,由隐马尔可夫模型描述。基于模式相关的 Lyapunov–Krasovskii 函数,闭环控制系统随机稳定且严格\((\mu ,\vartheta ,\upsilon ){-}\gamma\)的充分条件- 获得耗散。此外,通过使用矩阵缩放和松弛矩阵技术简化了耗散控制器的设计。最后,以机械臂系统为例,验证了我们提出的设计方法的有效性。








































 京公网安备 11010802027423号
京公网安备 11010802027423号