Neural Processing Letters ( IF 2.6 ) Pub Date : 2022-08-29 , DOI: 10.1007/s11063-022-11018-x Heng Yuan , Huan Qi
|
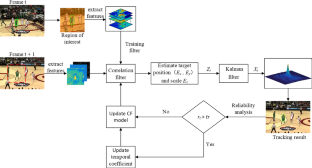
Discriminative correlation filters (DCF) have significantly advanced visual target tracking. However, most DCF-based trackers suffer from various challenges such as occlusion, rotation, and background clutters. Therefore, we propose a novel visual tracking framework, which introduces a motion-aware strategy and automatic temporal regularization mechanism into the spatial-temporal regularization correlation filter (STRCF) to improve tracking stability. Specifically, the motion-aware strategy based on the optimal Kalman filter (KF) is used to estimate the possible state of the target for overcoming the instability problem in complex environments. Furthermore, a novel automatic temporal regularization mechanism is proposed to solve the problem of target drift due to overhigh temporal penalty. Compared with STRCF, our method obtains AUC gains of 5.86%, 2.60%, 3.82%, 4.95%, 3.55%, and 1.90% for the occlusion, motion blur, in-plane Rotation, out-of-plane rotation, background clutters, and scale variation attributes on the OTB-2015 datasets, respectively. Extensive experiment results on OTB-2013, DTB-70, and UAV-123 datasets have proven the effectiveness and stability of our method.
中文翻译:
具有运动感知和自动时间正则化的鲁棒视觉跟踪
判别相关滤波器 (DCF) 具有显着先进的视觉目标跟踪。然而,大多数基于 DCF 的跟踪器都面临各种挑战,例如遮挡、旋转和背景杂波。因此,我们提出了一种新颖的视觉跟踪框架,将运动感知策略和自动时间正则化机制引入时空正则化相关滤波器(STRCF),以提高跟踪稳定性。具体来说,基于最优卡尔曼滤波器(KF)的运动感知策略用于估计目标的可能状态,以克服复杂环境中的不稳定性问题。此外,提出了一种新的自动时间正则化机制来解决由于时间惩罚过高导致的目标漂移问题。与 STRCF 相比,我们的方法获得了 5.86% 的 AUC 增益,OTB-2015 数据集上的遮挡、运动模糊、平面内旋转、平面外旋转、背景杂波和尺度变化属性分别为 2.60%、3.82%、4.95%、3.55% 和 1.90%。在 OTB-2013、DTB-70 和 UAV-123 数据集上的大量实验结果证明了我们方法的有效性和稳定性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号