Neural Processing Letters ( IF 2.6 ) Pub Date : 2022-08-15 , DOI: 10.1007/s11063-022-10960-0 Yang Jia , Guangtao Ran , Youmin Gong , Lijing Wang , Fengxia Xu
|
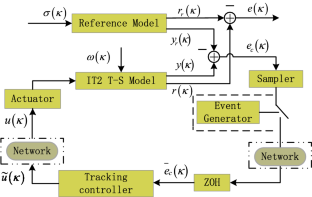
This paper explores the tracking control problem for a category of discrete-time nonlinear networked control systems (NCSs) with unknown state, parameter uncertainty, data packet dropout and time delay. Our aim is to construct a dynamic tracking feedback controller with a novel event-triggered (ET) scheme to guarantee the system output can track the reference output signal within an allowable error range. With the purpose of reducing the utilization of network resources, an improved adaptive ET communication scheme is designed at first, which can save more network resources. Secondly, the uncertainties can be easily expressed by using the interval type-2 (IT2) T-S fuzzy model to describe the nonlinear systems. Next, a dynamic feedback controller with asynchronous premise variables is designed, and the sufficient conditions for less conservative stability of the system and the design method of the controller are obtained by applying slack matrices. Finally, numerical examples are provided to further illustrate the validity of the strategy proposed in this paper.
中文翻译:
基于自适应事件触发策略的区间二型TS模糊非线性系统动态反馈跟踪控制
本文探讨了一类具有未知状态、参数不确定性、数据包丢失和时延的离散时间非线性网络控制系统(NCS)的跟踪控制问题。我们的目标是构建一个具有新颖事件触发(ET)方案的动态跟踪反馈控制器,以保证系统输出可以在允许的误差范围内跟踪参考输出信号。为了降低网络资源的利用率,首先设计了一种改进的自适应ET通信方案,可以节省更多的网络资源。其次,利用区间类型2(IT2)TS模糊模型来描述非线性系统,可以很容易地表达不确定性。接下来,设计了一个具有异步前提变量的动态反馈控制器,并应用松弛矩阵得到了系统不太保守稳定的充分条件和控制器的设计方法。最后,提供了数值例子来进一步说明本文提出的策略的有效性。








































 京公网安备 11010802027423号
京公网安备 11010802027423号