Neural Processing Letters ( IF 2.6 ) Pub Date : 2022-08-10 , DOI: 10.1007/s11063-022-10989-1 Youssef F. Hanna , A. Aziz Khater , Ahmad M. El-Nagar , Mohammad El-Bardini
|
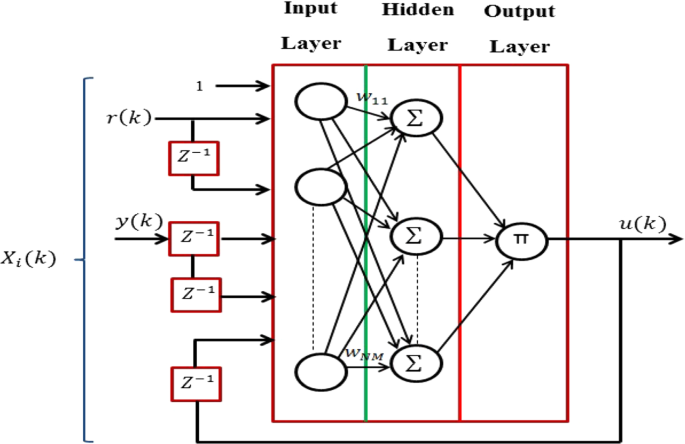
This paper introduces a novel structure of a polynomial weighted output recurrent neural network (PWORNN) for designing an adaptive proportional—integral—derivative (PID) controller. The proposed adaptive PID controller structure based on a polynomial weighted output recurrent neural network (APID-PWORNN) is introduced. In this structure, the number of tunable parameters for the PWORNN only depends on the number of hidden neurons and it is independent of the number of external inputs. The proposed structure of the PWORNN aims to reduce the number of tunable parameters, which reflects on the reduction of the computation time of the proposed algorithm. To guarantee the stability, the optimization, and speed up the convergence of the tunable parameters, i.e., output weights, the proposed network is trained using Lyapunov stability criterion based on an adaptive learning rate. Moreover, by applying the proposed scheme to a nonlinear mathematical system and the heat exchanger system, the robustness of the proposed APID-PWORNN controller has been investigated in this paper and proven its superiority to deal with the nonlinear dynamical systems considering the system parameters uncertainties, disturbances, set-point change, and sensor measurement uncertainty.
中文翻译:
具有稳定学习算法的多项式循环神经网络自适应PID控制器
本文介绍了一种用于设计自适应比例-积分-微分 (PID) 控制器的多项式加权输出递归神经网络 (PWORNN) 的新颖结构。介绍了基于多项式加权输出循环神经网络(APID-PWORNN)的自适应PID控制器结构。在这种结构中,PWORNN 的可调参数数量仅取决于隐藏神经元的数量,而与外部输入的数量无关。所提出的 PWORNN 结构旨在减少可调参数的数量,这反映了所提出算法的计算时间的减少。为了保证稳定性,优化和加速可调参数的收敛,即输出权重,所提出的网络使用基于自适应学习率的 Lyapunov 稳定性标准进行训练。此外,通过将所提出的方案应用于非线性数学系统和热交换器系统,本文研究了所提出的 APID-PWORNN 控制器的鲁棒性,并证明了其处理考虑系统参数不确定性的非线性动力系统的优越性,干扰、设定点变化和传感器测量不确定性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号