Medical Image Analysis ( IF 10.7 ) Pub Date : 2022-08-06 , DOI: 10.1016/j.media.2022.102569 Juan Carlos Ángeles Cerón 1 , Gilberto Ochoa Ruiz 1 , Leonardo Chang 1 , Sharib Ali 2
|
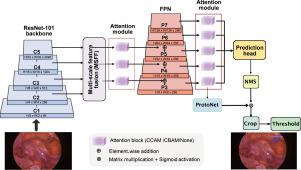
Precise instrument segmentation aids surgeons to navigate the body more easily and increases patient safety. While accurate tracking of surgical instruments in real-time plays a crucial role in minimally invasive computer-assisted surgeries, it is a challenging task to achieve, mainly due to: (1) a complex surgical environment, and (2) model design trade-off in terms of both optimal accuracy and speed. Deep learning gives us the opportunity to learn complex environment from large surgery scene environments and placements of these instruments in real world scenarios. The Robust Medical Instrument Segmentation 2019 challenge (ROBUST-MIS) provides more than 10,000 frames with surgical tools in different clinical settings. In this paper, we propose a light-weight single stage instance segmentation model complemented with a convolutional block attention module for achieving both faster and accurate inference. We further improve accuracy through data augmentation and optimal anchor localization strategies. To our knowledge, this is the first work that explicitly focuses on both real-time performance and improved accuracy. Our approach out-performed top team performances in the most recent edition of ROBUST-MIS challenge with over 44% improvement on area-based multi-instance dice metric MI_DSC and 39% on distance-based multi-instance normalized surface dice MI_NSD. We also demonstrate real-time performance ( frames-per-second) with different but competitive variants of our final approach.
中文翻译:
使用注意力和多尺度特征融合的手术器械实时实例分割
精确的器械分割有助于外科医生更轻松地在体内导航并提高患者的安全性。虽然实时准确跟踪手术器械在微创计算机辅助手术中起着至关重要的作用,但这是一项具有挑战性的任务,主要是由于:(1) 复杂的手术环境,以及 (2) 模型设计贸易-在最佳精度和速度方面都关闭。深度学习让我们有机会从大型手术场景环境和这些仪器在现实场景中的放置中学习复杂的环境。Robust Medical Instrument Segmentation 2019 挑战 (ROBUST-MIS) 在不同的临床环境中提供了超过 10,000 个带有手术工具的框架。在本文中,我们提出了一种轻量级单阶段实例分割模型,辅以卷积块注意模块,以实现更快、更准确的推理。我们通过数据增强和最佳锚点定位策略进一步提高准确性。据我们所知,这是第一项明确关注实时性能和提高准确性的工作。我们的方法在最新一期的 ROBUST-MIS 挑战赛中表现优于顶级团队,在基于区域的多实例骰子度量 MI_DSC 上提高了 44% 以上,在基于距离的多实例归一化表面骰子 MI_NSD 上提高了 39%。我们还展示了实时性能(这是第一项明确关注实时性能和提高准确性的工作。我们的方法在最新一期的 ROBUST-MIS 挑战赛中表现优于顶级团队,在基于区域的多实例骰子度量 MI_DSC 上提高了 44% 以上,在基于距离的多实例归一化表面骰子 MI_NSD 上提高了 39%。我们还展示了实时性能(这是第一项明确关注实时性能和提高准确性的工作。我们的方法在最新一期的 ROBUST-MIS 挑战赛中表现优于顶级团队,在基于区域的多实例骰子度量 MI_DSC 上提高了 44% 以上,在基于距离的多实例归一化表面骰子 MI_NSD 上提高了 39%。我们还展示了实时性能(每秒帧数)与我们最终方法的不同但有竞争力的变体。










































 京公网安备 11010802027423号
京公网安备 11010802027423号