Microsystem Technologies ( IF 1.6 ) Pub Date : 2022-07-29 , DOI: 10.1007/s00542-022-05351-3 Seung Ho Lee , Dong Jun Oh , Sang Hoon Ji , Ja Choon Koo
|
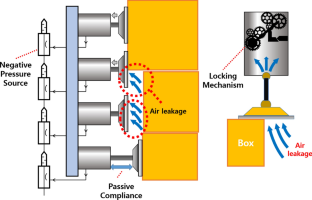
This paper proposes a new vacuum suction actuator mechanism that uses an elastic structure to increase vacuum efficiency. A typical problem in the vacuum suction system design might be the diversity of the target object topology, especially when applied for object handling tasks. When several objects must be lifted at once, the efficiency of suction operation could be deteriorated due to the incomplete attachment of suction pads. The situation might be worse when the target objects have uneven surfaces. A new mechanism has been proposed to solve these problems. The newly proposed vacuum suction actuator has passive compliance enabled with standard springs. This mechanism provides a higher enhancement in vacuum distribution, and the entire grasping mechanism successfully maintains the proper level of vacuum. The proposed method should be utilized in a portable vacuum suction-based grasping system with limited vacuum power. The theoretical vacuum efficiency was calculated, and a static simulation was performed. Experiments were conducted comparing the cases where this mechanism and the traditional check valve were used.
中文翻译:
被动漏气检测机制,提高真空吸力执行器效率
本文提出了一种新的真空吸力执行机构,该机构采用弹性结构来提高真空效率。真空抽吸系统设计中的一个典型问题可能是目标对象拓扑的多样性,尤其是在应用于对象处理任务时。当必须同时提升多个物体时,由于吸盘的不完全附着,可能会降低吸附操作的效率。当目标对象具有不平坦的表面时,情况可能会更糟。已经提出了一种新的机制来解决这些问题。新提出的真空吸力执行器通过标准弹簧实现了被动顺应性。这种机制提供了更高的真空分布增强,并且整个抓取机制成功地保持了适当的真空水平。所提出的方法应用于具有有限真空功率的便携式真空吸力抓取系统。计算了理论真空效率,并进行了静态模拟。进行了比较使用这种机构和传统止回阀的情况的实验。










































 京公网安备 11010802027423号
京公网安备 11010802027423号