Advances in Computational Mathematics ( IF 1.7 ) Pub Date : 2022-07-27 , DOI: 10.1007/s10444-022-09966-y Lyle Noakes , Erchuan Zhang
|
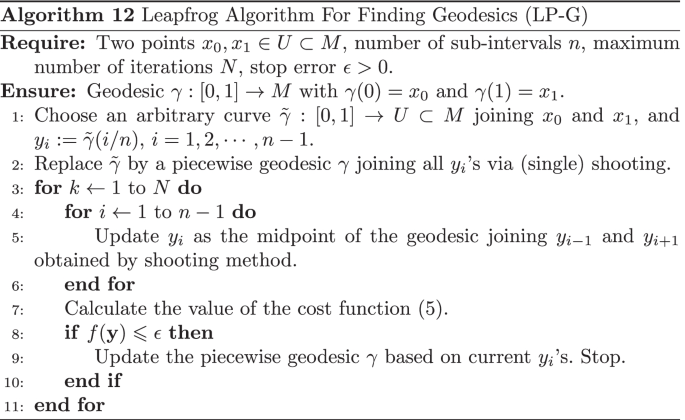
Finding a geodesic joining two given points in a complete path-connected Riemannian manifold requires much more effort than determining a geodesic from initial data. This is because it is much harder to solve boundary value problems than initial value problems. Shooting methods attempt to solve boundary value problems by solving a sequence of initial value problems, and usually need a good initial guess to succeed. The present paper finds a geodesic \(\gamma :[0,1]\rightarrow M\) on the Riemannian manifold M with γ(0) = x0 and γ(1) = x1 by dividing the interval [0,1] into several sub-intervals, preferably just enough to enable a good initial guess for the boundary value problem on each subinterval. Then a geodesic joining consecutive endpoints (local junctions) is found by single shooting. Our algorithm then adjusts the junctions, either (1) by minimizing the total squared norm of the differences between associated geodesic velocities using Riemannian gradient descent, or (2) by solving a nonlinear system of equations using Newton’s method. Our algorithm is compared with the known leapfrog algorithm by numerical experiments on a 2-dimensional ellipsoid Ell(2) and on a left-invariant 3-dimensional special orthogonal group SO(3). We find Newton’s method (2) converges much faster than leapfrog when more junctions are needed, and that a good initial guess can be found for (2) by starting with Riemannian gradient descent method (1).
中文翻译:
寻找连接给定点的测地线
在完整的路径连接的黎曼流形中找到连接两个给定点的测地线比从初始数据确定测地线需要更多的努力。这是因为解决边值问题比解决初值问题要困难得多。射击方法试图通过解决一系列初始值问题来解决边值问题,通常需要良好的初始猜测才能成功。本文在黎曼流形M上找到一个测地线\(\gamma :[0,1]\rightarrow M\) ,其中γ (0) = x 0和γ (1) = x 1通过将区间 [0,1] 划分为几个子区间,最好刚好足以对每个子区间的边界值问题进行良好的初始猜测。然后通过单次射击找到连接连续端点(局部连接点)的测地线。然后,我们的算法调整连接点,或者(1)通过使用黎曼梯度下降法最小化相关测地线速度之间差异的总平方范数,或者(2)通过使用牛顿法求解非线性方程组。通过对二维椭球 Ell(2) 和左不变 3 维特殊正交群S O的数值实验,将我们的算法与已知的跳蛙算法进行比较(3)。我们发现当需要更多的连接点时,牛顿法 (2) 的收敛速度比蛙跳法快得多,并且从黎曼梯度下降法 (1) 开始可以为 (2) 找到一个好的初始猜测。










































 京公网安备 11010802027423号
京公网安备 11010802027423号