Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2022-07-23 , DOI: 10.1016/j.sna.2022.113779 Mohammadreza Lalegani Dezaki , Mahdi Bodaghi , Ahmad Serjouei , Shukri Afazov , Ali Zolfagharian
|
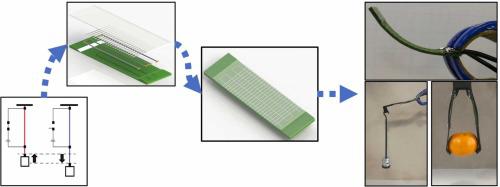
This research demonstrates how a combination of two-way shape memory alloy (SMA), low-temperature liquid epoxy cure composites, and fibre reinforced plastic (FRP) may be utilised to create a novel reversible actuator with built driven functionality. The novelty of this work is that the actuator can reverse its original shape and be mounted on different customized structures. The strategy is based on a knowledge of SMA wires and the manufacturing principle underlying composite structure, as well as experiments to see how soft SMA-FRP can be programmed to bend. The folding mechanism is studied in terms of fabrication factors such as SMA training and strong interfacial bonding between SMA and epoxy resin, which influence the programming process and shape change. The two-way SMA wires are trained using the pre-straining method to programme the SMAs. The technique has been used to assemble the SMA wires with bond reliability to enhance the actuator interface's thermal behaviour. The SMA elements are directly inserted into FRP strips and epoxy resin is used as an adhesive, resulting in dynamic hybrid composites. The module is actuated using an electrical board with a current value between 3 and 6 A. The robustness, controllability, mechanical properties, and 500 life cycles of the actuator are tested. Results indicate a bending angle of 58° with 30 mm of deflection in 7 s after actuating the module. Also, 3D printing is used to print a gripper inspired by human fingers and a structure to lift various weights. The actuator’s performance as a soft gripper is reliable in terms of grasping objects of different shapes.
中文翻译:
自适应可逆复合材料形状记忆合金软执行器
这项研究展示了如何将双向形状记忆合金 (SMA)、低温液态环氧树脂固化复合材料和纤维增强塑料 (FRP) 结合起来,创建一种具有内置驱动功能的新型可逆致动器。这项工作的新颖之处在于执行器可以反转其原始形状并安装在不同的定制结构上。该策略基于对 SMA 线材和复合结构基础制造原理的了解,以及了解如何对柔软的 SMA-FRP 进行编程以使其弯曲的实验。从影响编程过程和形状变化的SMA训练和SMA与环氧树脂之间的强界面结合等制造因素研究折叠机制。使用预应变方法对双向 SMA 线进行训练,以对 SMA 进行编程。该技术已用于组装具有键合可靠性的 SMA 线,以增强执行器接口的热性能。SMA元件直接插入FRP条中,环氧树脂用作粘合剂,产生动态混合复合材料。该模块使用电流值在 3 到 6 A 之间的电路板驱动。测试了执行器的稳健性、可控性、机械性能和 500 次生命周期。结果表明,在启动模块后 7 秒内弯曲角度为 58°,偏转 30 mm。此外,3D 打印用于打印受人类手指启发的抓手和举起各种重物的结构。执行器作为软抓手的性能在抓取不同形状的物体方面是可靠的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号