Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Interactive and synergistic behaviours of multiple heterogeneous microrobots
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-07-18 , DOI: 10.1039/d2lc00265e Shilu Zhu 1 , Weijie Zheng 1 , Jian Wang 1 , Xingmiao Fang 1 , Lijiu Zhang 2 , Fuzhou Niu 3 , Ying Wang 4 , Tingting Luo 1 , Guangli Liu 1 , Runhuai Yang 1
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-07-18 , DOI: 10.1039/d2lc00265e Shilu Zhu 1 , Weijie Zheng 1 , Jian Wang 1 , Xingmiao Fang 1 , Lijiu Zhang 2 , Fuzhou Niu 3 , Ying Wang 4 , Tingting Luo 1 , Guangli Liu 1 , Runhuai Yang 1
Affiliation
|
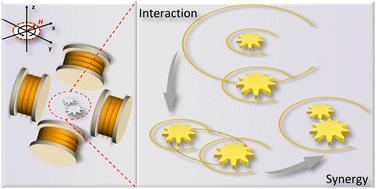
Microrobots have been extensively studied for biomedical applications, and significant innovations and advances have been made in diverse aspects of the field. However, most studies have been based on individual microrobots with limited capabilities, constraining their scalability of functions for practical use. Here, we demonstrate the interactive and synergistic behaviours of multiple microrobots that are heterogeneous or incompletely homogeneous. A frequency-response theory is proposed where in a certain frequency range of an external rotating magnetic field (RMF), microrobots with dispersed and linearly aligned magnetic nanoparticles (MNPs) would exhibit similar and different behaviour, respectively. These microrobots rotate following the rotation of the external field, and such complete rotational motion is interrupted when the frequency exceeds a certain value, called the critical frequency (cf), but such behaviour is more prominent in microrobots with linear MNPs. Upon further investigating the effect of various parameters on the cf of the microrobots during the fabrication process, we find that heterogeneous microrobots with specific cf values can be customized. In addition, experiments and simulations are combined to show the hydrodynamic behaviours around the rotating microrobots at different frequencies. Based on these findings, the interactive and synergistic behaviours of multiple microrobots are presented, which suggests great potential for the independent execution of multiple tasks or the synergistic performance of complex tasks and is significant for the future development of interactive synergistic microrobots in the biomedical field.
中文翻译:

多个异构微型机器人的交互和协同行为
微型机器人已被广泛研究用于生物医学应用,并在该领域的各个方面取得了重大创新和进步。然而,大多数研究都是基于功能有限的单个微型机器人,限制了它们在实际使用中的功能可扩展性。在这里,我们展示了多个异质或不完全同质的微型机器人的交互和协同行为。提出了频率响应理论,其中在外部旋转磁场 (RMF) 的特定频率范围内,具有分散和线性排列的磁性纳米粒子 (MNP) 的微型机器人将分别表现出相似和不同的行为。这些微型机器人随着外场的旋转而旋转,c f ),但这种行为在具有线性 MNP 的微型机器人中更为突出。在进一步研究制造过程中各种参数对微型机器人c f的影响后,我们发现具有特定c f的异质微型机器人值可以自定义。此外,实验和模拟相结合,以展示不同频率下旋转微型机器人周围的流体动力学行为。基于这些发现,提出了多个微型机器人的交互和协同行为,这表明了在独立执行多个任务或协同执行复杂任务方面的巨大潜力,对于未来在生物医学领域的交互协同微型机器人的发展具有重要意义。
更新日期:2022-07-18
中文翻译:
多个异构微型机器人的交互和协同行为
微型机器人已被广泛研究用于生物医学应用,并在该领域的各个方面取得了重大创新和进步。然而,大多数研究都是基于功能有限的单个微型机器人,限制了它们在实际使用中的功能可扩展性。在这里,我们展示了多个异质或不完全同质的微型机器人的交互和协同行为。提出了频率响应理论,其中在外部旋转磁场 (RMF) 的特定频率范围内,具有分散和线性排列的磁性纳米粒子 (MNP) 的微型机器人将分别表现出相似和不同的行为。这些微型机器人随着外场的旋转而旋转,c f ),但这种行为在具有线性 MNP 的微型机器人中更为突出。在进一步研究制造过程中各种参数对微型机器人c f的影响后,我们发现具有特定c f的异质微型机器人值可以自定义。此外,实验和模拟相结合,以展示不同频率下旋转微型机器人周围的流体动力学行为。基于这些发现,提出了多个微型机器人的交互和协同行为,这表明了在独立执行多个任务或协同执行复杂任务方面的巨大潜力,对于未来在生物医学领域的交互协同微型机器人的发展具有重要意义。








































 京公网安备 11010802027423号
京公网安备 11010802027423号