Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2022-07-11 , DOI: 10.1016/j.sna.2022.113747 Chaoqun Xiang , Yisheng Guan , Haifei Zhu , Shangcan Lin , Yaowei Song
|
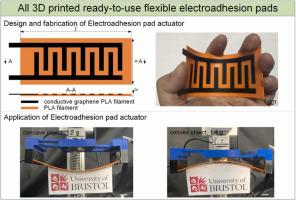
Electroadhesion is a promising adhesion mechanism widely employed in robotics with advantages including enhanced adaptability, gentle/flexible handling, reduced complexity, and ultralow energy consumption. Currently, all electroadhesion pads are manually fabricated, which limits their applications. In contrast, new, easy-to-implement, cost-effective, and entirely 3D printed flexible electroadhesion pads made of both non-conductive polylactide and graphene conductive polylactide are presented in this paper. Moreover, their statics model for geometric dimensions and flexibility is established via the pseudo rigid body model. Then, normal electroadhesion force measurements and electrostatic simulation of the flexible electroadhesive pads are conducted. Finally, a 3D printed curvature adjustable gripper based on flexible electroadhesive pads that can actively grasp flat, concave, and convex objects is presented. These FEPs are expected to widen the preparation technology and increase the use of electroadhesion in soft robots application.
中文翻译:
所有 3D 打印即用型柔性电粘附垫
电粘附是一种有前途的粘附机制,广泛应用于机器人技术中,具有适应性强、操作温和/灵活、复杂性降低和超低能耗等优点。目前,所有的电粘附垫都是手工制作的,这限制了它们的应用。相比之下,本文介绍了由非导电聚丙交酯和石墨烯导电聚丙交酯制成的新型、易于实施、具有成本效益且完全 3D 打印的柔性电粘附垫。此外,它们的几何尺寸和柔度的静力学模型是通过伪刚体模型建立的。然后,对柔性电粘附垫进行正常的电粘附力测量和静电模拟。最后,提出了一种基于柔性电粘附垫的 3D 打印曲率可调夹具,可以主动抓取平面、凹面和凸面物体。这些 FEP 有望拓宽制备技术并增加电粘附在软机器人应用中的使用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号