当前位置:
X-MOL 学术
›
Contin. Mech. Thermodyn.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Matrix formalism used to describe the inertial properties in multibody dynamics
Continuum Mechanics and Thermodynamics ( IF 1.9 ) Pub Date : 2022-07-04 , DOI: 10.1007/s00161-022-01120-9 Sorin Vlase , Marin Marin , Andreas Öchsner , Eliza Chircan
中文翻译:

用于描述多体动力学中的惯性特性的矩阵形式
更新日期:2022-07-05
Continuum Mechanics and Thermodynamics ( IF 1.9 ) Pub Date : 2022-07-04 , DOI: 10.1007/s00161-022-01120-9 Sorin Vlase , Marin Marin , Andreas Öchsner , Eliza Chircan
|
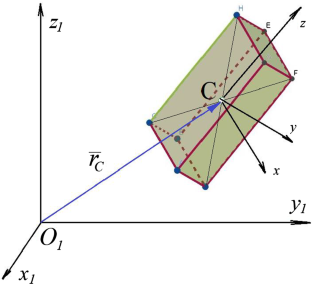
A matrix-based representation of the inertial characteristics with possible used in multibody dynamics is presented in the paper. The paper aims to develop a unitary formalism that will help to model multibody systems, for the purpose of kinematic and dynamic analysis. Properties of the inertia matrix due to the symmetry of this matrix are presented. The points with spherical and cylindrical symmetry are identified, which allow the easier writing of the equations of motion. The form of the inertia matrix from any body of a multibody system in the global reference system is shown.
中文翻译:
用于描述多体动力学中的惯性特性的矩阵形式
本文提出了一种基于矩阵的惯性特性表示,可能用于多体动力学。本文旨在开发一种统一的形式,这将有助于对多体系统进行建模,以进行运动学和动力学分析。由于该矩阵的对称性,给出了惯性矩阵的性质。识别出具有球面和柱面对称性的点,这样可以更容易地编写运动方程。显示了来自全局参考系中多体系统的任何物体的惯性矩阵的形式。










































 京公网安备 11010802027423号
京公网安备 11010802027423号