Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Micro-object manipulation by decanol liquid lenses
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-06-29 , DOI: 10.1039/d2lc00386d Yijing Yang 1, 2 , Rong Chen 1, 2 , Xun Zhu 1, 2 , Dingding Ye 1, 2 , Yang Yang 1, 2 , Wei Li 1, 2 , Dongliang Li 1, 2 , Haonan Li 1, 2 , Qiang Liao 1, 2
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-06-29 , DOI: 10.1039/d2lc00386d Yijing Yang 1, 2 , Rong Chen 1, 2 , Xun Zhu 1, 2 , Dingding Ye 1, 2 , Yang Yang 1, 2 , Wei Li 1, 2 , Dongliang Li 1, 2 , Haonan Li 1, 2 , Qiang Liao 1, 2
Affiliation
|
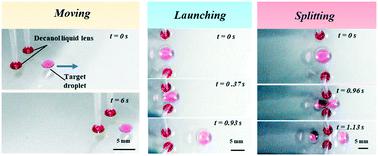
The flexible and precise manipulation of droplets on an air–liquid interface with complex functions remains challenging. Herein, we propose a smart strategy for excellently manipulating target droplets by decanol liquid lenses. A moveable surface tension gradient field generated by decanol liquid lenses is responsible for realizing various functions of transportation, launching and splitting of target droplets. With such fascinating features, directional long-distance transportation and on-demand droplet coalescence are enabled. Moreover, paw-like liquid lenses are constructed, which realizes a complex process, including collection, capture, transportation and release of target droplets. Remarkably, this strategy can also be applied to manipulate particles and liquid marbles other than droplets, eliminating the limitation of object properties. This work offers a smart strategy for manipulating micro-objects, which shows great potential in applications such as lab-on-a-chip, diagnostics, analytical chemistry and bioengineering, etc.
中文翻译:

癸醇液体透镜的微物体操作
在具有复杂功能的气液界面上灵活和精确地操纵液滴仍然具有挑战性。在此,我们提出了一种通过癸醇液体透镜出色地操纵目标液滴的智能策略。癸醇液体透镜产生的一个可移动的表面张力梯度场,负责实现目标液滴的输送、发射和分裂等多种功能。凭借这些引人入胜的功能,可以实现定向长途运输和按需液滴聚结。此外,还构造了爪状液体透镜,实现了一个复杂的过程,包括目标液滴的收集、捕获、运输和释放。值得注意的是,该策略还可以应用于操纵液滴以外的颗粒和液体弹珠,消除了物体属性的限制。等等
更新日期:2022-06-29
中文翻译:
癸醇液体透镜的微物体操作
在具有复杂功能的气液界面上灵活和精确地操纵液滴仍然具有挑战性。在此,我们提出了一种通过癸醇液体透镜出色地操纵目标液滴的智能策略。癸醇液体透镜产生的一个可移动的表面张力梯度场,负责实现目标液滴的输送、发射和分裂等多种功能。凭借这些引人入胜的功能,可以实现定向长途运输和按需液滴聚结。此外,还构造了爪状液体透镜,实现了一个复杂的过程,包括目标液滴的收集、捕获、运输和释放。值得注意的是,该策略还可以应用于操纵液滴以外的颗粒和液体弹珠,消除了物体属性的限制。等等








































 京公网安备 11010802027423号
京公网安备 11010802027423号