Chemical Engineering Science ( IF 4.1 ) Pub Date : 2022-06-17 , DOI: 10.1016/j.ces.2022.117802 Chengyu Zhou , Li Jia , Yang Zhou
|
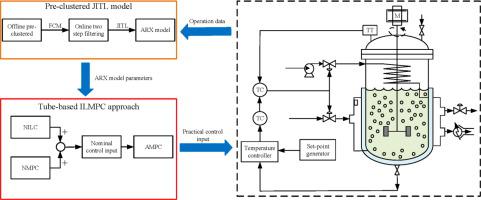
Iterative-learning-model predictive control (ILMPC) has been considered a potential control strategy for batch processes. ILMPC can converge to the desired reference trajectory with high precision along cycles and reject real-time disturbances within cycles. However, as a model-based control method, the control performance of the ILMPC algorithm deteriorates when it suffers the problem of model-plant mismatches. Therefore, simultaneously guaranteeing system convergence along the cycle-axis and robust stability on the time-axis is a challenging task in the framework designing of ILMPC control systems. To this end, we present a type of tube-based ILMPC strategy based on an empirical model for nonlinear batch processes. First, to describe the dynamic behavior of nonlinear batch processes as much as possible with the goal of low computational cost and high modeling accuracy, a pre-clustered just-in-time learning (JITL) model focused on operation data is developed. Then, an ancillary MPC controller is combined with the ILMPC algorithm to form a tube scheme to relieve the impact of model error. In addition, we construct an inverse model system (IMS) to systematically determine the first cycle control input trajectory of the proposed tube-based ILMPC algorithm. As a result, they simultaneously ensure the system convergence along the cycle-axis and robust stability on the time-axis. Still, they can improve convergence speed and tracking performance. Finally, comparative simulations demonstrate the superiority of the proposed control algorithm.
中文翻译:
基于管的迭代学习模型预测控制批处理使用预集群即时学习方法
迭代学习模型预测控制 (ILMPC) 已被认为是批处理过程的潜在控制策略。ILMPC 可以沿周期高精度地收敛到所需的参考轨迹,并拒绝周期内的实时干扰。然而,作为一种基于模型的控制方法,ILMPC算法的控制性能在遇到模型-工厂失配问题时会恶化。因此,同时保证系统沿周期轴的收敛性和时间轴上的鲁棒稳定性是 ILMPC 控制系统框架设计中的一项具有挑战性的任务。为此,我们提出了一种基于非线性批处理经验模型的基于管的 ILMPC 策略。第一的,为了尽可能地描述非线性批处理的动态行为,以达到低计算成本和高建模精度的目标,开发了一种专注于操作数据的预聚类即时学习 (JITL) 模型。然后,将辅助 MPC 控制器与 ILMPC 算法相结合,形成管方案,以减轻模型误差的影响。此外,我们构建了一个逆模型系统(IMS)来系统地确定所提出的基于管的 ILMPC 算法的第一个循环控制输入轨迹。因此,它们同时确保了系统沿周期轴的收敛性和时间轴上的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。开发了一个专注于操作数据的预集群即时学习 (JITL) 模型。然后,将辅助 MPC 控制器与 ILMPC 算法相结合,形成管方案,以减轻模型误差的影响。此外,我们构建了一个逆模型系统(IMS)来系统地确定所提出的基于管的 ILMPC 算法的第一个循环控制输入轨迹。因此,它们同时确保了系统沿周期轴的收敛性和时间轴上的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。开发了一个专注于操作数据的预集群即时学习 (JITL) 模型。然后,将辅助 MPC 控制器与 ILMPC 算法相结合,形成管方案,以减轻模型误差的影响。此外,我们构建了一个逆模型系统(IMS)来系统地确定所提出的基于管的 ILMPC 算法的第一个循环控制输入轨迹。因此,它们同时确保了系统沿周期轴的收敛性和时间轴上的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。辅助 MPC 控制器与 ILMPC 算法相结合,形成管方案,以减轻模型误差的影响。此外,我们构建了一个逆模型系统(IMS)来系统地确定所提出的基于管的 ILMPC 算法的第一个循环控制输入轨迹。因此,它们同时确保了系统沿周期轴的收敛性和时间轴上的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。辅助 MPC 控制器与 ILMPC 算法相结合,形成管方案,以减轻模型误差的影响。此外,我们构建了一个逆模型系统(IMS)来系统地确定所提出的基于管的 ILMPC 算法的第一个循环控制输入轨迹。因此,它们同时确保了系统沿周期轴的收敛性和时间轴上的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。它们同时保证了系统沿周期轴的收敛和时间轴的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。它们同时保证了系统沿周期轴的收敛和时间轴的鲁棒稳定性。尽管如此,它们仍然可以提高收敛速度和跟踪性能。最后,比较仿真证明了所提出的控制算法的优越性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号