Microsystem Technologies ( IF 1.6 ) Pub Date : 2022-06-14 , DOI: 10.1007/s00542-022-05323-7 Vannam Giap , Hongson Vu , Quangdich Nguyen , Shyh-Chour Huang
|
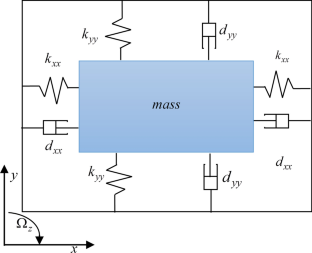
This paper proposes a novel disturbance observer (DOB) based on the free-chattering sliding-mode control (SMC) to compensate the changing of the disturbance and uncertain values of a micro-electromechanical system (MEMS) gyroscope. First, the mathematical model of the MEMS system is briefly described. Second, the SMC without the sign function was designed to deal with the problem of tracking references of the MEMS system. Due to the chattering occurs from switching control value, this paper used the sliding phase control without the sign function. Third, a DOB was proposed without the information of control inputs. To delete the conjunction of the first derivative disturbance value, a low-pass-filter was applied to drive the feedback disturbance value for compensating the perturbations of the MEMS system. Fourth, the stability of proposed control method was fulfilled the Lyapunov condition. The simulation results are used to verify the correction of the proposed theory. The effectiveness of the novel disturbance observer based on free-chattering control is a good result of tracking control performances for MEMS system. The tested disturbances and uncertainties on x- and y-axis were mostly rejected. The settling time and overshoot values are very small, the maximum settling-time value is 0.3 s. The steady-state are \(e_{x} \in ( - 10.09, \, 10.03) \times 10^{ - 4}\) and \(e_{x} \in ( - 13.29, \, 14.88) \times 10^{ - 4} ,\) for x- and y-axes, respectively.
中文翻译:
基于无颤振滑模控制的MEMS陀螺仪扰动观测器
本文提出了一种基于自由颤振滑模控制(SMC)的新型扰动观测器(DOB)来补偿微机电系统(MEMS)陀螺仪扰动和不确定值的变化。首先,简要描述MEMS系统的数学模型。其次,设计了无符号功能的SMC来处理MEMS系统的跟踪参考问题。由于切换控制值会出现抖动,本文采用不带符号函数的滑动相位控制。第三,提出了一个没有控制输入信息的 DOB。为了消除一阶导数扰动值的合取,采用低通滤波器驱动反馈扰动值,以补偿MEMS系统的扰动。第四,所提出的控制方法的稳定性满足李雅普诺夫条件。仿真结果用于验证所提理论的修正。基于自由颤振控制的新型扰动观测器的有效性是MEMS系统跟踪控制性能的良好结果。测试的干扰和不确定性x轴和y轴大多被拒绝。建立时间和过冲值非常小,最大建立时间值为 0.3 s。稳态是\(e_{x} \in ( - 10.09, \, 10.03) \times 10^{ - 4}\)和\(e_{x} \in ( - 13.29, \, 14.88) \times 10^{ - 4} ,\)分别用于x - 和y -轴。










































 京公网安备 11010802027423号
京公网安备 11010802027423号