EURASIP Journal on Advances in Signal Processing ( IF 1.7 ) Pub Date : 2022-05-16 , DOI: 10.1186/s13634-022-00875-2 Tunan Li , Zhaohuan Zhan , Guang Tan
|
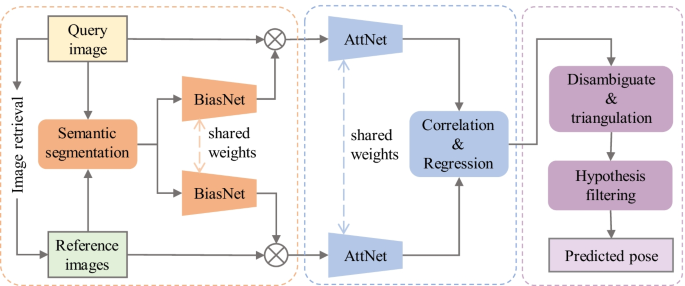
Visual localization is the task of accurate camera pose estimation within a scene and is a crucial technique for computer vision and robotics. Among the various approaches, relative pose estimation has gained increasing interest because it can generalize to new scenes. This approach learns to regress relative pose between image pairs. However, unreliable regions that contain objects such as the sky, persons, or moving cars are often present in real images, causing noise and interference to localization. In this paper, we propose a novel relative pose estimation pipeline to address the problem. The pipeline features a semantic masking module and an attention module. The two modules help suppress interfering information from unreliable regions, while at the same time emphasizing important features with an attention mechanism. Experiment results show that our framework outperforms alternative methods in the accuracy of camera pose prediction in all scenes.
中文翻译:
使用语义掩蔽和注意力进行准确的视觉定位
视觉定位是在场景中准确估计相机姿态的任务,是计算机视觉和机器人技术的关键技术。在各种方法中,相对姿态估计越来越受到关注,因为它可以推广到新场景。这种方法学习回归图像对之间的相对姿势。然而,包含天空、人或移动的汽车等物体的不可靠区域经常出现在真实图像中,从而导致噪声和对定位的干扰。在本文中,我们提出了一种新的相对姿态估计管道来解决这个问题。该管道具有语义掩蔽模块和注意模块。这两个模块有助于抑制来自不可靠区域的干扰信息,同时通过注意力机制强调重要特征。










































 京公网安备 11010802027423号
京公网安备 11010802027423号