Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
A tripodal wheeled mobile robot driven by a liquid metal motor
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-04-25 , DOI: 10.1039/d2lc00267a Rui Xue 1 , Wenshang Guo 1 , Ye Tao 1, 2 , Yukun Ren 1
Lab on a Chip ( IF 6.1 ) Pub Date : 2022-04-25 , DOI: 10.1039/d2lc00267a Rui Xue 1 , Wenshang Guo 1 , Ye Tao 1, 2 , Yukun Ren 1
Affiliation
|
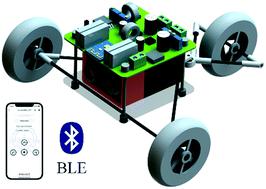
As a novel driving concept, the liquid metal motor (LMM) has been regarded as a promising actuator due to its unique traits, such as infinitely variable speed, lack of transmission chain, convenient maintenance, and silence. However, at present, driving devices based on this material are still in the preliminary and rudimentary stage, and representative application examples are scarce. Therefore, an 8-shaped tripodal wheeled mobile robot (WMR) completely driven by a LMM is designed in this study to further prove the practicability of this material. Through combining the Marangoni surface flow on a liquid metal droplet (LMD) caused by an electrochemical reaction and the eccentric torque generated by the change in droplet shape and position, the two independently driven wheels of the mobile robot are actuated at differential moving speeds. Additionally, a matching control module, a cell phone application, and a battery have been developed and added for wireless control of three types of driving functions (moving forward, steering, and stopping). It is expected that this work could further advance the development and application of LMMs and bring new ideas to the design of WMRs.
中文翻译:

由液态金属电机驱动的三足轮式移动机器人
作为一种新颖的驱动概念,液态金属电机(LMM)以其无级变速、无传动链、维修方便、静音等特点而被认为是一种很有前途的执行器。但目前,基于这种材料的驱动装置还处于初级和初级阶段,具有代表性的应用实例很少。因此,本研究设计了一个完全由LMM驱动的8形三足轮式移动机器人(WMR),以进一步证明该材料的实用性。通过将电化学反应引起的液态金属液滴 (LMD) 上的 Marangoni 表面流动与液滴形状和位置变化产生的偏心扭矩相结合,移动机器人的两个独立驱动轮以不同的移动速度驱动。此外,还开发并添加了匹配控制模块、手机应用程序和电池,用于对三种类型的驾驶功能(前进、转向和停止)进行无线控制。预计这项工作可以进一步推动LMM的开发和应用,并为WMR的设计带来新的思路。
更新日期:2022-04-25
中文翻译:
由液态金属电机驱动的三足轮式移动机器人
作为一种新颖的驱动概念,液态金属电机(LMM)以其无级变速、无传动链、维修方便、静音等特点而被认为是一种很有前途的执行器。但目前,基于这种材料的驱动装置还处于初级和初级阶段,具有代表性的应用实例很少。因此,本研究设计了一个完全由LMM驱动的8形三足轮式移动机器人(WMR),以进一步证明该材料的实用性。通过将电化学反应引起的液态金属液滴 (LMD) 上的 Marangoni 表面流动与液滴形状和位置变化产生的偏心扭矩相结合,移动机器人的两个独立驱动轮以不同的移动速度驱动。此外,还开发并添加了匹配控制模块、手机应用程序和电池,用于对三种类型的驾驶功能(前进、转向和停止)进行无线控制。预计这项工作可以进一步推动LMM的开发和应用,并为WMR的设计带来新的思路。










































 京公网安备 11010802027423号
京公网安备 11010802027423号