Machine Vision and Applications ( IF 2.4 ) Pub Date : 2022-04-02 , DOI: 10.1007/s00138-022-01296-9 Mingyi Huang 1 , Jun Wu 1 , Peng Zhiyong 1, 2 , Xuemei Zhao 1
|
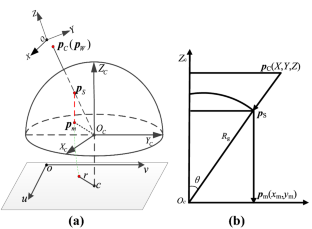
This paper presents a novel technique for wide-angle fisheye lens calibration which requires neither metric information nor particular reference pattern. First, the fisheye imaging model with the interior Orientation parameters (IOPs)—principal point (u0,v0), focal length f, aspect ratio λ and radial distortion coefficients (k1, k2), is established. Then, upon the fisheye imaging model and the parameter dependency between f and (k1, k2), the radial distortion projection ellipse constraint (RDPEC) for space lines in fisheye image is mathematically formulated to build a non-linear calibration model for high-precision estimation of the IOPs. In this step, parameter initialization based on the geometry of fisheye image outline ellipse (FIOE) is discussed as well. Finally, initial IOPs are further optimized though least square technique by taking the projection ellipse arcs of space lines in fisheye image as observation. The proposed calibration technique was tested on two kinds of fisheye images: (a) simulated image with a set of ground-truth IOPs, (b) internet images with unknown IOPs. Experimental results show that the calibration parameters in this paper are in the best agreement with the fisheye imaging model, compared with the ground-truth parameters and the parameters estimated by two state-of-the-art literature. Compared to that by a state-of-the-art CNN and the well-known software DXO, the proposed technique can enable a high-quality correction of fisheye images in different regions. This makes it very useful in application scenarios containing space lines, such as urban panorama surveillance, auto-parking and, robot navigation.
中文翻译:
具有径向畸变投影椭圆约束(RDPEC)的广角鱼眼镜头高精度标定
本文提出了一种新的广角鱼眼镜头校准技术,它既不需要度量信息,也不需要特定的参考模式。首先,建立具有内部方向参数(IOP)——主点(u 0,v 0)、焦距f、纵横比λ和径向畸变系数(k 1,k 2)的鱼眼成像模型。然后,根据鱼眼成像模型和f和 ( k 1 , k 2之间的参数依赖性),对鱼眼图像中空间线的径向畸变投影椭圆约束(RDPEC)进行了数学公式化,以建立用于高精度估计IOP的非线性校准模型。在这一步中,还讨论了基于鱼眼图像轮廓椭圆(FIOE)几何的参数初始化。最后,以鱼眼图像中空间线的投影椭圆弧为观察点,通过最小二乘技术进一步优化初始眼压。所提出的校准技术在两种鱼眼图像上进行了测试:(a)具有一组真实 IOP 的模拟图像,(b)具有未知 IOP 的互联网图像。实验结果表明,本文的标定参数与鱼眼成像模型的一致性最好,与ground-truth参数和两个最先进的文献估计的参数进行比较。与最先进的 CNN 和著名的软件 DXO 相比,所提出的技术可以对不同区域的鱼眼图像进行高质量校正。这使得它在包含空间线的应用场景中非常有用,例如城市全景监控、自动泊车和机器人导航。










































 京公网安备 11010802027423号
京公网安备 11010802027423号