Journal of Signal Processing Systems ( IF 1.6 ) Pub Date : 2022-04-01 , DOI: 10.1007/s11265-022-01754-7 Bharadwaja Yathirajam 1, 2 , Vaitheeswaran Sevoor Meenakshisundaram 1, 2 , Ananda Challaghatta Muniyappa 1, 2
|
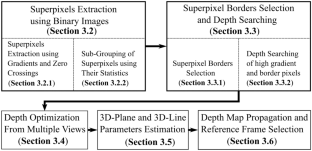
Depth estimation of pixels having low intensity gradient is a difficult task. Since they contain very less information with its neighborhood (i.e., similar in intensity due to lack of texture), their tracking for depth becomes difficult in consecutive temporal images. In recent times, dense-mapping methods based on mid-level features such as Superpixels or planes are being proposed to estimate depth of the low-gradient pixels. These methods have advantage of less computation resource requirements, with the possibility of computing full Monocular-Simultanuous Localization And Mapping (SLAM) processing on a CPU, i.e., these do not require GPU. In the sperpixel based existing approaches, the superpixels are formed by extracting similar intensity pixels and their depth map is estimated from their high gradient border pixels. Whereas the drawbacks are higher computational time is required for the superpixel segmentation, semi-dense mapping and planar mapping. This paper proposes a method to estimate the depth map of planar regions using binary images instead of full intensity range images (gray/color image) and a novel solution to differentiate differently oriented planes grouped as a single superpixel due to similarity in the intensities. The computational time is reduced while improving the efficiency of the segmentation, which is demonstrated in real-time experiments. Efficacy of the proposed method is compared with recent techniques based on learning approach and model-based approach. The proposed method is compared with the existing methods using publicly available datasets. The results show, higher density and lesser computational time for the depth map estimation in the proposed method when compared with other model-based approaches. When compared with learning-based approaches, the proposed method shows better accuracy in the depth estimation.
中文翻译:
使用二值图像进行单目视觉惯性密集映射的超像素
具有低强度梯度的像素的深度估计是一项艰巨的任务。由于它们的邻域包含非常少的信息(即由于缺乏纹理而在强度上相似),因此在连续的时间图像中它们的深度跟踪变得困难。最近,人们提出了基于超像素或平面等中级特征的密集映射方法来估计低梯度像素的深度。这些方法具有计算资源需求较少的优点,可以在 CPU 上计算完整的单目同步定位和映射 (SLAM) 处理,即,这些不需要GPU。在基于超像素的现有方法中,超像素是通过提取相似强度的像素形成的,并且它们的深度图是从它们的高梯度边界像素估计的。而缺点是超像素分割、半密集映射和平面映射需要更高的计算时间。本文提出了一种使用二值图像而不是全强度范围图像(灰色/彩色图像)来估计平面区域深度图的方法,以及一种新颖的解决方案,以区分由于强度相似而分组为单个超像素的不同方向的平面。在提高分割效率的同时减少了计算时间,这在实时实验中得到了证明。将所提出方法的有效性与基于学习方法和基于模型方法的最新技术进行了比较。将所提出的方法与使用公开可用数据集的现有方法进行比较。结果表明,与其他基于模型的方法相比,该方法中深度图估计的密度更高,计算时间更短。与基于学习的方法相比,所提出的方法在深度估计方面表现出更好的准确性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号