International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-11-29 , DOI: 10.1016/j.ijmecsci.2021.106972 Saeed Mouloodi 1 , Hadi Rahmanpanah 1 , Colin Martin 2 , Soheil Gohari 1 , Colin Burvill 1 , Helen M S Davies 3
|
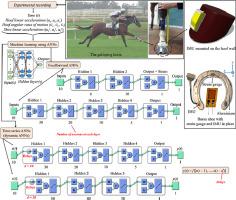
Mobility solutions offered by living creatures have inspired engineers to capture their locomotion patterns and then develop novel animal-like robots that use legs for locomotion. Exploring relationships amongst mechanical responses and kinematic parameters is essential for both inventing these robots and enhancing computational techniques. Establishment of accurate physical models to quantify mechanical responses of biological systems is challenging because the corresponding variables are multidimensional, dynamic and highly nonlinear. This encourages the advent of data-driven models in mechanical sciences. This paper delves into the use of feedforward and time-series (dynamic) artificial neural networks (ANN) to analyse experimental data recorded from a racing horse exercised up to 60 km/h to then relate hoof mechanical strain to kinematic parameters recorded experimentally. An inertial measurement unit that was comprised of a sensor and data acquisition system package was designed and mounted on the horse's hoof to measure linear accelerations and angular rates of motion. In addition, an instrumented Aluminium horseshoe that was designed and manufactured and contained: (1) inertial sensors including three orthogonal accelerometers and three orthogonal rate gyroscopes; and, (2) a strain gauge located at the middle of the shoe. The horse was warmed up in a steady gallop at around 35 km/h for 1 km then turned around and galloped at increasing speed to 68 km/h back to the finishing line. Nine kinematic parameters, measured during horse exercise, formed the ANNs input variables: hoof linear accelerations along three orthogonal directions (axe,ay,az), hoof angular rates of motion along three orthogonal directions (Gx, Gy, Gz), shoe linear accelerations along three orthogonal directions (axs, ays, azs), and time. Feedforward and time-series ANNs trained using 1,000,000 experimental instances offered excellent reliability for the prediction of mechanical strain from kinematic measurements, i.e. R ≥ 0.97.
中文翻译:
使用深度学习算法根据运动期间从马蹄记录的线性加速度和运动角速率来预测机械应变
生物提供的移动解决方案激发了工程师捕捉它们的运动模式,然后开发使用腿进行运动的新型动物机器人。探索机械响应和运动学参数之间的关系对于发明这些机器人和增强计算技术都是必不可少的。建立精确的物理模型来量化生物系统的机械响应具有挑战性,因为相应的变量是多维的、动态的和高度非线性的。这鼓励了机械科学中数据驱动模型的出现。本文深入研究了使用前馈和时间序列(动态)人工神经网络 (ANN) 来分析从以 60 公里/小时的速度运动的赛马记录的实验数据,然后将马蹄机械应变与实验记录的运动学参数联系起来。由传感器和数据采集系统包组成的惯性测量单元被设计并安装在马蹄上,以测量线性加速度和运动角速率。此外,设计和制造的仪表化铝马蹄铁包含: (1) 惯性传感器,包括三个正交加速度计和三个正交速率陀螺仪;(2) 位于鞋中部的应变计。这匹马以大约 35 公里/小时的速度稳定驰骋 1 公里,然后掉头并以 68 公里/小时的速度疾驰回到终点线。在马匹运动期间测量的九个运动学参数形成了人工神经网络的输入变量:沿三个正交方向的蹄线加速度(axe,a y, a z ),蹄沿三个正交方向 ( G x , G y , G z )的运动角速率,沿三个正交方向 ( a x s , a y s , a z s ) 的蹄线加速度,和时间。使用 1,000,000 个实验实例训练的前馈和时间序列 ANN 为根据运动测量预测机械应变提供了极好的可靠性,即R ≥ 0.97。










































 京公网安备 11010802027423号
京公网安备 11010802027423号