Medical Image Analysis ( IF 10.7 ) Pub Date : 2021-10-22 , DOI: 10.1016/j.media.2021.102287 Xiangde Luo 1 , Tao Song 2 , Guotai Wang 3 , Jieneng Chen 4 , Yinan Chen 5 , Kang Li 6 , Dimitris N Metaxas 7 , Shaoting Zhang 1
|
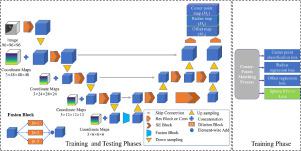
Automatic and accurate lung nodule detection from 3D Computed Tomography (CT) scans plays a vital role in efficient lung cancer screening. Despite the state-of-the-art performance obtained by recent anchor-based detectors using Convolutional Neural Networks (CNNs) for this task, they require predetermined anchor parameters such as the size, number, and aspect ratio of anchors, and have limited robustness when dealing with lung nodules with a massive variety of sizes. To overcome these problems, we propose a 3D sphere representation-based center-points matching detection network (SCPM-Net) that is anchor-free and automatically predicts the position, radius, and offset of nodules without manual design of nodule/anchor parameters. The SCPM-Net consists of two novel components: sphere representation and center points matching. First, to match the nodule annotation in clinical practice, we replace the commonly used bounding box with our proposed bounding sphere to represent nodules with the centroid, radius, and local offset in 3D space. A compatible sphere-based intersection over-union loss function is introduced to train the lung nodule detection network stably and efficiently. Second, we empower the network anchor-free by designing a positive center-points selection and matching (CPM) process, which naturally discards pre-determined anchor boxes. An online hard example mining and re-focal loss subsequently enable the CPM process to be more robust, resulting in more accurate point assignment and mitigation of class imbalance. In addition, to better capture spatial information and 3D context for the detection, we propose to fuse multi-level spatial coordinate maps with the feature extractor and combine them with 3D squeeze-and-excitation attention modules. Experimental results on the LUNA16 dataset showed that our proposed SCPM-Net framework achieves superior performance compared with existing anchor-based and anchor-free methods for lung nodule detection with the average sensitivity at 7 predefined FPs/scan of . Moreover, our sphere representation is verified to achieve higher detection accuracy than the traditional bounding box representation of lung nodules. Code is available at: https://github.com/HiLab-git/SCPM-Net.
中文翻译:
SCPM-Net:使用球体表示和中心点匹配的无锚定 3D 肺结节检测网络
通过 3D 计算机断层扫描 (CT) 扫描自动准确地检测肺结节在高效肺癌筛查中发挥着至关重要的作用。尽管最近使用卷积神经网络 (CNN) 的基于锚的检测器在该任务中获得了最先进的性能,但它们需要预先确定的锚参数,例如锚的大小、数量和纵横比,并且鲁棒性有限在处理各种大小的肺结节时。为了克服这些问题,我们提出了一种基于 3D 球体表示的中心点匹配检测网络 (SCPM-Net),该网络无锚,无需手动设计结节/锚参数即可自动预测结节的位置、半径和偏移量。SCPM-Net 由两个新颖的组件组成:球体表示和中心点匹配。第一的,为了匹配临床实践中的结节注释,我们将常用的边界框替换为我们提出的边界球,以在 3D 空间中表示具有质心、半径和局部偏移的结节。引入了一种兼容的基于球体的交叉联合损失函数,以稳定有效地训练肺结节检测网络。其次,我们通过设计一个正中心点选择和匹配 (CPM) 过程来增强网络无锚点,该过程自然会丢弃预先确定的锚框。随后,在线硬样本挖掘和重新聚焦损失使 CPM 过程更加稳健,从而实现更准确的点分配和类不平衡的缓解。此外,为了更好地捕捉空间信息和 3D 上下文进行检测,我们建议将多级空间坐标图与特征提取器融合,并将它们与 3D 挤压和激发注意模块相结合。在 LUNA16 数据集上的实验结果表明,与现有的基于锚和无锚的肺结节检测方法相比,我们提出的 SCPM-Net 框架实现了卓越的性能,平均灵敏度为 7 个预定义的 FPs/扫描. 此外,我们的球体表示经过验证,可以实现比肺结节的传统边界框表示更高的检测精度。代码位于:https://github.com/HiLab-git/SCPM-Net。










































 京公网安备 11010802027423号
京公网安备 11010802027423号