当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
NanoRobotic Structures with Embedded Actuation via Ion Induced Folding
Advanced Materials ( IF 27.4 ) Pub Date : 2021-09-23 , DOI: 10.1002/adma.202103371 Amine Benouhiba 1 , Léo Wurtz 1 , Jean-Yves Rauch 1 , Joël Agnus 1 , Kanty Rabenorosoa 1 , Cédric Clévy 1
Advanced Materials ( IF 27.4 ) Pub Date : 2021-09-23 , DOI: 10.1002/adma.202103371 Amine Benouhiba 1 , Léo Wurtz 1 , Jean-Yves Rauch 1 , Joël Agnus 1 , Kanty Rabenorosoa 1 , Cédric Clévy 1
Affiliation
|
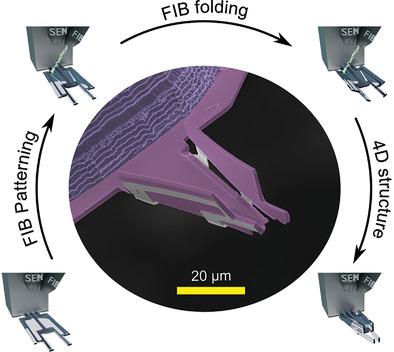
4D structures are tridimensional structures with time-varying abilities that provide high versatility, sophisticated designs, and a broad spectrum of actuation and sensing possibilities. The downsizing of these structures below 100 μm opens up exceptional opportunities for many disciplines, including photonics, acoustics, medicine, and nanorobotics. However, it requires a paradigm shift in manufacturing methods, especially for dynamic structures. A novel fabrication method based on ion-induced folding of planar multilayer structures embedding their actuation is proposed—the planar structures are fabricated in bulk through batch microfabrication techniques. Programmable and accurate bidirectional foldings (−70° − +90°) of Silica/Chromium/Aluminium (SiO2/Cr/Al) multilayer structures are modeled, experimentally demonstrated then applied to embedded electrothermal actuation of controllable and dynamic 4D nanorobotic structures. The method is used to produce high-performances case-study grippers for nanorobotic applications in confined environments. Once folded, a gripping task at the nano-scale is demonstrated. The proposed fabrication method is suitable for creating small-scale 4D systems for nanorobotics, medical devices, and tunable metamaterials, where rapid folding and enhanced dynamic control are required.
中文翻译:

通过离子诱导折叠具有嵌入式驱动的纳米机器人结构
4D 结构是具有随时间变化的能力的三维结构,可提供高度的多功能性、复杂的设计以及广泛的驱动和传感可能性。将这些结构缩小到 100 μm 以下为许多学科提供了绝佳的机会,包括光子学、声学、医学和纳米机器人。然而,它需要制造方法的范式转变,特别是对于动态结构。提出了一种基于离子诱导折叠平面多层结构嵌入其驱动的新型制造方法——通过批量微细加工技术批量制造平面结构。二氧化硅/铬/铝 (SiO 2 ) 的可编程且精确的双向折叠 (−70° - +90°)/Cr/Al) 多层结构被建模、实验证明,然后应用于可控和动态 4D 纳米机器人结构的嵌入式电热驱动。该方法用于为受限环境中的纳米机器人应用生产高性能案例研究夹具。折叠后,将展示纳米级的抓取任务。所提出的制造方法适用于为需要快速折叠和增强动态控制的纳米机器人、医疗设备和可调谐超材料创建小规模 4D 系统。
更新日期:2021-11-09
中文翻译:
通过离子诱导折叠具有嵌入式驱动的纳米机器人结构
4D 结构是具有随时间变化的能力的三维结构,可提供高度的多功能性、复杂的设计以及广泛的驱动和传感可能性。将这些结构缩小到 100 μm 以下为许多学科提供了绝佳的机会,包括光子学、声学、医学和纳米机器人。然而,它需要制造方法的范式转变,特别是对于动态结构。提出了一种基于离子诱导折叠平面多层结构嵌入其驱动的新型制造方法——通过批量微细加工技术批量制造平面结构。二氧化硅/铬/铝 (SiO 2 ) 的可编程且精确的双向折叠 (−70° - +90°)/Cr/Al) 多层结构被建模、实验证明,然后应用于可控和动态 4D 纳米机器人结构的嵌入式电热驱动。该方法用于为受限环境中的纳米机器人应用生产高性能案例研究夹具。折叠后,将展示纳米级的抓取任务。所提出的制造方法适用于为需要快速折叠和增强动态控制的纳米机器人、医疗设备和可调谐超材料创建小规模 4D 系统。










































 京公网安备 11010802027423号
京公网安备 11010802027423号