Automation in Construction ( IF 9.6 ) Pub Date : 2021-09-21 , DOI: 10.1016/j.autcon.2021.103939 Jiahao Jin 1, 2, 3 , Weimin Zhang 1, 2, 3 , Fangxing Li 1, 2, 3 , Mingzhu Li 1, 2, 3 , Yongliang Shi 1, 2, 3 , Ziyuan Guo 1, 2, 3 , Qiang Huang 1, 2, 3
|
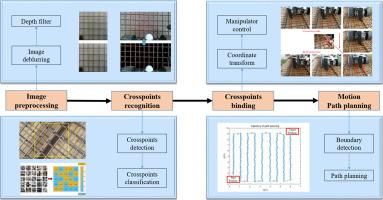
In the construction industry, rebar crosspoints binding relies heavily on manual work, which has become the bottleneck of construction-efficiency improvement. In this study, a full-automatic robot system, based on active perception and planning, is developed to realize the automation of the rebar crosspoints binding process. Based on the preprocessed image from an RGBD camera, a neural network method is proposed to recognize the rebar crosspoints. An active planning method to traverse the rebar plane is designed in the results of crosspoints recognition. Experiment results show that the rebar crosspoints recognition method has high accuracy (the detection accuracy is more than 89% and the classification accuracy is more than 98%). Experiments in realistic scenarios show that the robot system can traverse the rebar plane and bind the rebar crosspoints automatically to reduce labor costs. In the future, the robot system will work in curved environments and have higher detection accuracy.
中文翻译:
基于主动感知与规划的钢筋机器人绑定
在建筑行业,钢筋交叉点绑定严重依赖手工作业,这已成为提高施工效率的瓶颈。在本研究中,开发了一种基于主动感知和规划的全自动机器人系统,以实现钢筋交叉点绑定过程的自动化。基于RGBD相机的预处理图像,提出了一种神经网络方法来识别钢筋交叉点。在交叉点识别的结果中,设计了一种穿越钢筋平面的主动规划方法。实验结果表明,该钢筋交叉点识别方法具有较高的准确率(检测准确率89%以上,分类准确率98%以上)。真实场景实验表明,机器人系统可以穿越钢筋平面,自动绑定钢筋交叉点,降低人工成本。未来,机器人系统将在弯曲环境下工作,具有更高的检测精度。










































 京公网安备 11010802027423号
京公网安备 11010802027423号