Applied Energy ( IF 10.1 ) Pub Date : 2021-09-17 , DOI: 10.1016/j.apenergy.2021.117853 Quan Zhou 1, 2 , Yanfei Li 2 , Dezong Zhao 3 , Ji Li 1 , Huw Williams 1 , Hongming Xu 1, 2, 4 , Fuwu Yan 4
|
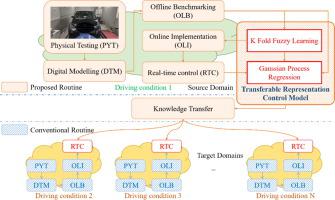
Electric vehicles, including plug-in hybrids, are important for achieving net-zero emission and will dominate road transportation in the future. Energy management, which optimizes the onboard energy usage, is a critical functionality of electric vehicles. It is usually developed following the model-based routine, which is conventionally costly and time-consuming and is hard to meet the increasing market competition in the digital era. To reduce the development workload for the energy management controller, this paper studies an innovative transfer learning routine. A new transferable representation control model is proposed by incorporating two promising artificial intelligence technologies, adaptive neural fuzzy inference system and Gaussian process regression, where the former applies k-fold cross valudation to build a neural fuzzy system for real-time implementation of offline optimization result, and the later connects the neural fuzzy system with a ‘deeper’ architecture to transfer the offline optimization knowledge learnt at source domain to new target domains. By introducing a concept of control utility that evaluates vehicle energy efficiency with a penalty on usage of battery energy, experimental evaluations based on the hardware-in-the-loop testing platform are conducted. Competitive real-time control ultility values (as much as 90% of offline benchmarking results) can be achieved by the proposed control method. They are over 27% higher than that achieved by the neural-network-based model.
中文翻译:
基于k折模糊学习和高斯过程回归的插电式混合动力汽车实时能量管理的可迁移表征建模
电动汽车,包括插电式混合动力汽车,对于实现净零排放非常重要,并将在未来主导道路交通。优化车载能源使用的能源管理是电动汽车的一项关键功能。它通常按照基于模型的程序开发,传统上成本高、耗时长,难以满足数字时代日益激烈的市场竞争。为了减少能源管理控制器的开发工作量,本文研究了一种创新的迁移学习程序。通过结合两种有前途的人工智能技术,自适应神经模糊推理系统和高斯过程回归,提出了一种新的可转移表示控制模型,其中前者应用 k 折交叉评估来构建神经模糊系统以实时实现离线优化结果,后者将神经模糊系统与“更深”的架构连接起来,将在源域学到的离线优化知识转移到新的目标域。通过引入评估车辆能量效率的控制效用概念,对电池能量的使用进行惩罚,基于硬件在环测试平台进行实验评估。所提出的控制方法可以实现具有竞争力的实时控制效用值(高达 90% 的离线基准测试结果)。它们比基于神经网络的模型实现的高 27% 以上。后者将神经模糊系统与“更深”的架构连接起来,将在源域中学到的离线优化知识转移到新的目标域中。通过引入评估车辆能量效率的控制效用概念,对电池能量的使用进行惩罚,基于硬件在环测试平台进行实验评估。所提出的控制方法可以实现具有竞争力的实时控制效用值(高达 90% 的离线基准测试结果)。它们比基于神经网络的模型实现的高 27% 以上。后者将神经模糊系统与“更深”的架构连接起来,将在源域中学到的离线优化知识转移到新的目标域中。通过引入评估车辆能量效率的控制效用概念,对电池能量的使用进行惩罚,基于硬件在环测试平台进行实验评估。所提出的控制方法可以实现具有竞争力的实时控制效用值(高达 90% 的离线基准测试结果)。它们比基于神经网络的模型实现的高 27% 以上。进行了基于硬件在环测试平台的实验评估。所提出的控制方法可以实现具有竞争力的实时控制效用值(高达 90% 的离线基准测试结果)。它们比基于神经网络的模型实现的高 27% 以上。进行了基于硬件在环测试平台的实验评估。所提出的控制方法可以实现具有竞争力的实时控制效用值(高达 90% 的离线基准测试结果)。它们比基于神经网络的模型实现的高 27% 以上。








































 京公网安备 11010802027423号
京公网安备 11010802027423号