Mechanism and Machine Theory ( IF 5.2 ) Pub Date : 2021-09-15 , DOI: 10.1016/j.mechmachtheory.2021.104544 Fuliang Niu 1 , Zhen Liu 1 , Haibo Gao 1 , Haitao Yu 1 , Nan Li 1 , Zongquan Deng 1
|
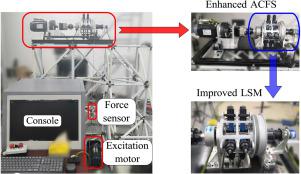
Dynamic constant-force performance is essential in suspended astronaut micro-gravity simulation systems. Of particular concern is the active constant-force system comprising a low-stiffness mechanism because of its combination of high-speed response and low stiffness. However, existing simulation systems demonstrate limited performance owing to large amounts of additional mass, difficulties in the fine adjustment of setting force, and low bandwidths. Improving on our previous work, we present a cascade constant-force system with an improved lightweight low-stiffness mechanism. In particular, the proposed system employs an innovative setting force adjusting mechanism with low inertia and a large reduction ratio obtained using a reverse-drive screw and nut mechanism. An in-depth theoretical analysis is conducted to reveal the disturbance suppression characteristics of the low-stiffness mechanism and actuator at different frequencies. The enhanced performance obtained using the low-stiffness mechanism was verified experimentally. It was shown that the improved mechanism significantly increases the system bandwidth and achieves an enhanced dynamic constant-force performance.
中文翻译:
基于改进的低刚度机构的增强级联恒力系统
动态恒力性能在悬浮宇航员微重力模拟系统中至关重要。特别值得关注的是包含低刚度机构的主动恒力系统,因为它结合了高速响应和低刚度。然而,由于大量的附加质量、设置力的微调困难和低带宽,现有的模拟系统表现出有限的性能。改进我们之前的工作,我们提出了一个级联恒力系统,它具有改进的轻量级低刚度机构。特别是,所提出的系统采用了一种创新的设定力调节机构,该机构具有低惯性和使用反向驱动丝杠和螺母机构获得的大减速比。深入的理论分析揭示了低刚度机构和执行器在不同频率下的扰动抑制特性。通过实验验证了使用低刚度机构获得的增强性能。结果表明,改进的机制显着增加了系统带宽并实现了增强的动态恒力性能。


























 京公网安备 11010802027423号
京公网安备 11010802027423号