Computers & Electrical Engineering ( IF 4.0 ) Pub Date : 2021-09-15 , DOI: 10.1016/j.compeleceng.2021.107406 Yaochen Li 1 , Yuting Chen 1 , Sheng Yuan 1 , Jingle Liu 1 , Xi Zhao 1 , Yang Yang 2 , Yuehu Liu 3
|
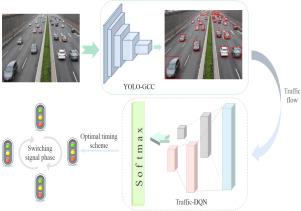
With the rapid development of unmanned aerial vehicle (UAV) technology, the UAV surveillance system has attracted extensive attention in the intelligent transportation community. In this paper, an object detection model with global context cross (YOLO-GCC) is proposed for identifying small sized traffic elements in UAV image sequences. The concept of the asymmetric convolution is introduced to increase the robustness of the object detection model. Moreover, a global context attention module is added to extract more efficient features to ensure the real-time performance while improving the detection accuracy of small objects. The evaluation and comparison results on multiple UAV datasets demonstrate the effectiveness of the proposed model. Furthermore, an intelligent traffic signal scheduling algorithm named Traffic Deep Q-Network(Traffic-DQN) using deep reinforcement learning is introduced, which utilizes the traffic flow data obtained from YOLO-GCC as the benchmark for traffic scheduling. The experimental results demonstrate that the proposed algorithm can effectively alleviate traffic congestion compared with other methods.
中文翻译:
用于智能交通调度的道路图像序列车辆检测
随着无人机(UAV)技术的飞速发展,无人机监控系统在智能交通领域引起了广泛关注。在本文中,提出了一种具有全局上下文交叉的对象检测模型(YOLO-GCC),用于识别无人机图像序列中的小尺寸交通元素。引入非对称卷积的概念以增加目标检测模型的鲁棒性。此外,添加了全局上下文注意模块以提取更有效的特征,以确保实时性,同时提高小物体的检测精度。在多个无人机数据集上的评估和比较结果证明了所提出模型的有效性。此外,介绍了一种使用深度强化学习的智能交通信号调度算法Traffic Deep Q-Network(Traffic-DQN),该算法利用从YOLO-GCC获得的交通流数据作为交通调度的基准。实验结果表明,与其他方法相比,所提出的算法能够有效缓解交通拥堵。










































 京公网安备 11010802027423号
京公网安备 11010802027423号