International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-09-14 , DOI: 10.1016/j.ijmecsci.2021.106799 Zhengang Yan 1 , Kaifa Wang 1 , Baolin Wang 1
|
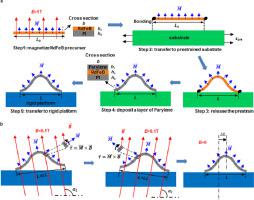
Magnetically actuated robots are attracting much interest due to the advantages of fast response, remote manipulation and enabling operations in enclosed spaces. Recent advances in fabricating ferromagnetic polymeric matrices embedded with hard magnetic fillers provide routes to multimodal locomotion for soft-bodied robots. One limitation of these matrix-based robot designs is that it requires low volume fraction of hard magnetic fillers to achieve soft and compliant robot body such that moderate magnetic fields are sufficient for actuation. However, low volume fraction of functional magnetic fillers leads to magnetically weak soft robots that are difficult to actuate. Here, we propose a compliant and high-performance robot design operating at magnetic fields down to 1 mT by utilizing a high-quality ferromagnetic film and mechanics-guided three-dimensional (3D) assembly technique. A parylene coating is deposited to keep the assembled arch shape, allowing releasing and actuating the structure as a freestanding robot. The robot would unfold and fold periodically under cyclic magnetic fields, driving the robot in a desired direction. To illustrate the versatile applicability of this approach, robots in two different representative geometries are presented, one in traditional straight configuration and the other in serpentine configuration. Through theoretical analysis and finite element analysis, fundamental results are offered for the proposed robot design, including concise solutions to the unfolding deformation, the effects of coating thickness on spring back, the maximum strain in the hard ferromagnetic film and a comparison of unfolding deformation of both designs. The results clearly show the effect of geometry/material parameters, external magnetic field and prestrain in assembly process, providing essential design guidelines to compliant and fast-moving magnetic robots via the proposed method.
中文翻译:
机车铁磁机器人展开变形的力学设计及解析解
由于具有快速响应、远程操作和能够在封闭空间内操作的优点,磁驱动机器人引起了极大的兴趣。制造嵌入硬磁性填料的铁磁聚合物基质的最新进展为软体机器人的多模态运动提供了途径。这些基于矩阵的机器人设计的一个限制是它需要低体积分数的硬磁填料来实现柔软和柔顺的机器人身体,这样适度的磁场就足以驱动。然而,功能性磁性填料的低体积分数导致难以驱动的磁性弱软机器人。这里,我们提出了一种兼容且高性能的机器人设计,通过利用高质量的铁磁薄膜和机械引导的三维 (3D) 组装技术,在低至 1 mT 的磁场下运行。聚对二甲苯涂层被沉积以保持组装的拱形形状,允许作为独立机器人释放和驱动结构。机器人会在周期性磁场下周期性地展开和折叠,从而驱动机器人向所需方向前进。为了说明这种方法的通用性,我们展示了两种不同的代表性几何形状的机器人,一种采用传统的直线配置,另一种采用蛇形配置。通过理论分析和有限元分析,为所提出的机器人设计提供了基本结果,包括展开变形的简明解决方案,涂层厚度对回弹的影响,硬铁磁膜中的最大应变以及两种设计的展开变形的比较。结果清楚地显示了几何/材料参数、外部磁场和预应变在装配过程中的影响,通过所提出的方法为柔顺和快速移动的磁性机器人提供了基本的设计指南。










































 京公网安备 11010802027423号
京公网安备 11010802027423号