Sensors and Actuators B: Chemical ( IF 8.0 ) Pub Date : 2021-09-14 , DOI: 10.1016/j.snb.2021.130735 Yifan Zheng 1 , Hong Huang 2 , Yan Wang 1 , Jing Zhu 1 , Junrong Yu 1 , Zuming Hu 1
|
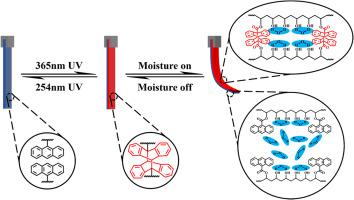
Actuators are a kind of energy-conversion devices which can perceive external stimulus and undergo reversible deformation or motion to produce a mechanical response. Developing actuators with advanced structures rather than typical bilayer configuration is essential for stable actuations, and installing reprogrammability into actuators for on-demand complex shape transformation within the same piece of material is more convenient and cost-effective for new actuation modes. However, actuators that satisfy these requirements have rarely been reported yet. Herein, a facile and low-cost design strategy for a transparent, gradient cross-linked, patternable and reprogrammable humidity-responsive actuator based on commercial available poly (vinyl alcohol) (PVA) is presented. The actuator is fabricated by grafting PVA with 9-anthracenecarboxylic acid (9-AN) via esterification and then blending with a UV-screening agent 2,2′,4,4′-tetrahydroxybenzophenone (THBP) followed by photo-crosslinking. In such design, the abundant hydroxyl groups in grafted PVA endow the actuator with humidity-responsive ability, the THBP enables the gradient cross-linking of actuator due to the attenuated UV intensity through the film thickness, and the photo-controlled reversible cross-linking of anthracene groups allows the patterning and reprogramming of the actuator. The chemical structure, gradient morphology, and humidity-responsiveness of actuators are thoroughly investigated. The fast actuation speed and large actuation amplitude, the realization of complex shape deformation by photo-controlled programming/reprogramming, and the biomimetic applications such as the soft walking robot are also demonstrated. This study is expected to provide new opportunity for facilely developing high-performance, stable and reprogrammable actuators.
中文翻译:
基于聚(乙烯醇)的梯度交联和可重新编程的湿度响应执行器
致动器是一种能感知外界刺激并发生可逆变形或运动以产生机械响应的能量转换装置。开发具有先进结构而不是典型双层配置的致动器对于稳定致动至关重要,并且在致动器中安装可重编程性以在同一块材料内按需进行复杂的形状变换,对于新的致动模式来说更加方便且更具成本效益。然而,满足这些要求的执行器却鲜有报道。在此,提出了一种基于市售聚乙烯醇 (PVA) 的透明、梯度交联、可图案化和可重新编程的湿度响应致动器的简便且低成本的设计策略。致动器是通过酯化将 PVA 与 9-蒽甲酸 (9-AN) 接枝,然后与紫外线屏蔽剂 2,2',4,4'-四羟基二苯甲酮 (THBP) 共混,然后进行光交联来制造的。在这种设计中,接枝 PVA 中丰富的羟基赋予致动器湿度响应能力,THBP 使致动器由于通过薄膜厚度衰减的紫外线强度而实现梯度交联,以及光控可逆交联蒽基团允许致动器的图案化和重新编程。对执行器的化学结构、梯度形态和湿度响应性进行了彻底研究。驱动速度快,驱动幅度大,通过光控编程/重编程实现复杂形状变形,还展示了仿生应用,如软步行机器人。这项研究有望为轻松开发高性能、稳定和可重新编程的执行器提供新的机会。










































 京公网安备 11010802027423号
京公网安备 11010802027423号