当前位置:
X-MOL 学术
›
Small Methods
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
An Artificial Mechano-Nociceptor with Mott Transition
Small Methods ( IF 10.7 ) Pub Date : 2021-09-09 , DOI: 10.1002/smtd.202100566 Mohit Kumar 1, 2 , Ji-Yong Park 1, 3 , Hyungtak Seo 1, 2
Small Methods ( IF 10.7 ) Pub Date : 2021-09-09 , DOI: 10.1002/smtd.202100566 Mohit Kumar 1, 2 , Ji-Yong Park 1, 3 , Hyungtak Seo 1, 2
Affiliation
|
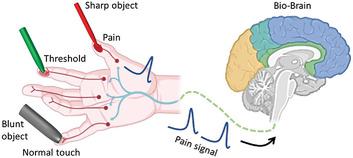
Intelligent touch sensing is now becoming an essential part of various human-machine interactions and communication, including in touchpads, autonomous vehicles, and smart robotics. Usually, sensing of physical objects is enabled by applied force/pressure sensors; however, reported conventional tactile devices are not able to differentiate sharp and blunt objects, although sharp objects can cause unavoidable damage. Therefore, it is central issue to implement electronic devices that can classify sense of touch and simultaneously generate pain signals to avoid further potential damage from sharp objects. Here, concept of force-enabled nociceptive behavior is proposed and demonstrated using vanadium oxide-based artificial receptors. Specifically, versatile criteria of bio-nociceptor like threshold, relaxation, no adaptation, allodynia, and hyperalgesia behaviors are triggered by pointed force, but the device does not mimic any of these by the force applied by blunt objects; thus, the proposed device classifies the intent of touch. Further, supported by finite element simulation, the nanoscale dynamic is unambiguously revealed by conductive atomic force microscopy and results are attributed to the point force-triggered Mott transition, as also confirmed by temperature-dependent measurements. The reported features open a new avenue for developing mechano-nociceptors, which enable a high-level of artificial intelligence within the device to classify physical touch.
中文翻译:

具有莫特转换的人工机械伤害感受器
智能触摸传感现在正成为各种人机交互和通信的重要组成部分,包括触摸板、自动驾驶汽车和智能机器人。通常,物理对象的感应是通过施加的力/压力传感器实现的;然而,报告的传统触觉设备无法区分尖锐物体和钝器,尽管尖锐物体会造成不可避免的伤害。因此,实现能够对触觉进行分类并同时产生疼痛信号以避免尖锐物体进一步造成潜在伤害的电子设备是核心问题。在这里,使用基于氧化钒的人工受体提出并证明了力启用伤害感受行为的概念。具体来说,生物伤害感受器的通用标准,如阈值、松弛、无适应、异常性疼痛、和痛觉过敏行为是由尖锐的力量触发的,但该设备不会通过钝物施加的力来模仿任何这些行为;因此,所提出的设备对触摸的意图进行了分类。此外,在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过温度相关测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过与温度相关的测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过温度相关测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。
更新日期:2021-10-28
中文翻译:
具有莫特转换的人工机械伤害感受器
智能触摸传感现在正成为各种人机交互和通信的重要组成部分,包括触摸板、自动驾驶汽车和智能机器人。通常,物理对象的感应是通过施加的力/压力传感器实现的;然而,报告的传统触觉设备无法区分尖锐物体和钝器,尽管尖锐物体会造成不可避免的伤害。因此,实现能够对触觉进行分类并同时产生疼痛信号以避免尖锐物体进一步造成潜在伤害的电子设备是核心问题。在这里,使用基于氧化钒的人工受体提出并证明了力启用伤害感受行为的概念。具体来说,生物伤害感受器的通用标准,如阈值、松弛、无适应、异常性疼痛、和痛觉过敏行为是由尖锐的力量触发的,但该设备不会通过钝物施加的力来模仿任何这些行为;因此,所提出的设备对触摸的意图进行了分类。此外,在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过温度相关测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过与温度相关的测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。在有限元模拟的支持下,纳米级动力学通过导电原子力显微镜明确揭示,结果归因于点力触发的莫特转变,这也通过温度相关测量得到证实。报告的功能为开发机械伤害感受器开辟了一条新途径,使设备内的高级人工智能能够对物理触摸进行分类。










































 京公网安备 11010802027423号
京公网安备 11010802027423号