Cell Reports Physical Science ( IF 7.9 ) Pub Date : 2021-09-10 , DOI: 10.1016/j.xcrp.2021.100572 Samuel E. Root 1 , Daniel J. Preston 1 , Gideon O. Feifke 1 , Hunter Wallace 1 , Renz Marion Alcoran 1 , Markus P. Nemitz 1 , Jovanna A. Tracz 1 , George M. Whitesides 1
|
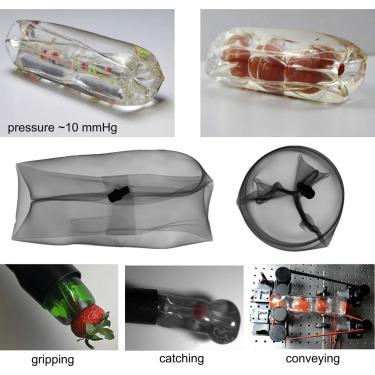
Biology is replete with soft mechanisms of potential use for robotics. Here, we report that a soft, toroidal hydrostat can be used to perform three functions found in both living and engineered systems: gripping, catching, and conveying. We demonstrate a gripping mechanism that uses a tubular inversion to encapsulate objects within a crumpled elastic membrane under hydrostatic pressure. This mechanism produces gripping forces that depend predictably upon the geometric and materials properties of the system. We next demonstrate a catching mechanism akin to that of a chameleon’s tongue: the elasticity of the membrane is used to power a catapulting inversion process (≈400 m/s2) to capture flying objects (e.g., a bouncing ball). Finally, we demonstrate a conveying mechanism that passes objects through the center of the toroidal tube (∼1 cm/s) using a continuous inversion-eversion process. The hybrid hard-soft mechanisms presented here can be applied toward the integration of soft functionality into robotic systems.
中文翻译:
使用环形静压器的软机构仿生设计
生物学充满了可用于机器人技术的软机制。在这里,我们报告了一个柔软的环形静压器可用于执行活体和工程系统中的三个功能:抓取、捕获和传送。我们展示了一种夹持机制,该机制使用管状倒置在静水压力下将物体封装在皱巴巴的弹性膜内。这种机制产生的夹持力可预测地取决于系统的几何和材料特性。我们接下来展示了一种类似于变色龙舌头的捕捉机制:膜的弹性用于为弹射反转过程提供动力 (≈400 m/s 2) 捕捉飞行物体(例如,弹跳球)。最后,我们展示了一种传送机制,该机制使用连续的反转 - 外翻过程将物体通过环形管的中心(~1 cm / s)。此处介绍的混合硬软机制可用于将软功能集成到机器人系统中。










































 京公网安备 11010802027423号
京公网安备 11010802027423号