Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2021-09-08 , DOI: 10.1016/j.sna.2021.113088 Asitha L. Kulasekera 1 , Rancimal B. Arumathanthri 1 , Damith S. Chathuranga 1 , R.A.R.C. Gopura 2 , Thilina D. Lalitharatne 3
|
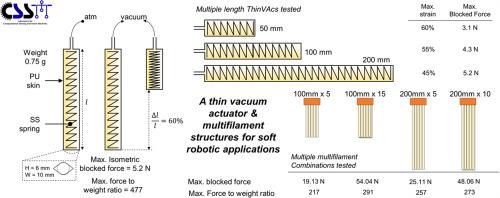
Most contemporary soft actuators tend to have a large cross-sectional area that prevents easy integration with wearable devices. Therefore, soft actuators ideal for wearable device integration should be capable of being mounted in a small amount of space, conforming to human body contours with minimal obstruction, and delivering adequate force to move the human body. Hence, in developing assistive devices ranging from orthosis to prosthesis, there is a need for low-profile, thin, lightweight, soft actuators with a high force-to-weight ratio. In this paper, the authors present a novel, thin-walled, lightweight, contractile, soft actuator (ThinVAc) that delivers a high force-to-weight ratio. First, the authors present the design, fabrication, and performance characterization of the ThinVAc. Second, a scalable, multi-filament actuator design is presented by combining multiple thin-walled actuators, including design, fabrication, and performance characterization. Next, the paper presents numerical models to describe the proposed actuator's contractile and blocked force performance, and predict the blocked force performance of the multi-filament actuator combinations. The lightweight ThinVAc (weighing about 1 g) presents a maximum contraction ratio of 60 % at no load condition, a maximum isometric blocked force of 5.2 N, and a force-to-weight ratio of 477. An 18 g multi-filament actuator made by bundling 15, 100 mm ThinVAcs can produce a maximum blocked force of 54 N at a force-to-weight ratio of 291.
中文翻译:
薄壁真空致动器 (ThinVAc) 和用于软机器人应用的多丝致动器的开发
大多数现代软致动器往往具有较大的横截面积,这阻碍了与可穿戴设备的轻松集成。因此,适用于可穿戴设备集成的软致动器应该能够安装在较小的空间内,以最小的阻碍符合人体轮廓,并提供足够的力来移动人体。因此,在开发从矫形器到假肢的辅助设备时,需要具有高力重量比的低剖面、薄、轻、软的致动器。在本文中,作者提出了一种新型、薄壁、轻质、可收缩、软致动器 (ThinVAc),可提供高力重量比。首先,作者介绍了 ThinVAc 的设计、制造和性能特征。其次,一个可扩展的,多丝致动器设计是通过组合多个薄壁致动器来呈现的,包括设计、制造和性能表征。接下来,本文提出了数值模型来描述所提出的致动器的收缩和阻塞力性能,并预测多丝致动器组合的阻塞力性能。轻量级 ThinVAc(重约 1 克)在空载条件下的最大收缩率为 60 %,最大等长阻塞力为 5.2 N,力重量比为 477。 制造的 18 g 多丝致动器通过捆绑 15、100 毫米 ThinVAc,可以在 291 的力重量比下产生 54 N 的最大阻挡力。本文提出了数值模型来描述所提出的致动器的收缩力和阻塞力性能,并预测多丝致动器组合的阻塞力性能。轻量级 ThinVAc(重约 1 g)在空载条件下的最大收缩率为 60%,最大等距阻塞力为 5.2 N,力重量比为 477。 18 g 多丝致动器通过捆绑 15、100 毫米 ThinVAc,可以在 291 的力重量比下产生 54 N 的最大阻挡力。本文提出了数值模型来描述所提出的致动器的收缩力和阻塞力性能,并预测多丝致动器组合的阻塞力性能。轻量级 ThinVAc(重约 1 g)在空载条件下的最大收缩率为 60%,最大等距阻塞力为 5.2 N,力重量比为 477。 18 g 多丝致动器通过捆绑 15、100 毫米 ThinVAc,可以在 291 的力重量比下产生 54 N 的最大阻挡力。










































 京公网安备 11010802027423号
京公网安备 11010802027423号