Journal of Process Control ( IF 4.2 ) Pub Date : 2021-09-05 , DOI: 10.1016/j.jprocont.2021.08.013 Pedro de Azevedo Delou 1 , Rodrigo Curvelo 1 , Maurício B. de Souza 1, 2 , Argimiro Resende Secchi 1
|
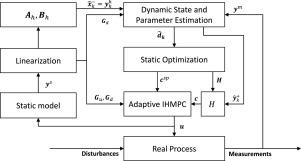
In processes with slow dynamics or subjected to frequent disturbances, the detection of a steady-state operation might be rare, which hinders the application of the classic RTO. To overcome this issue, the Hybrid RTO (HRTO) is a proposition where a dynamic observer substitutes the Steady-State Detection (SSD) and the static parameter estimation steps. Recent progress has been made in HRTO frameworks. Still, all of them start from the assumption that a reliable mechanistic dynamic model is available, which is not true in many applications. In fact, the development of a dynamic process model is not considered in most typical RTO design projects. Therefore, the present work proposes an HRTO framework aiming, mainly, to overcome this first assumption. We present a complete control framework where the basic assumption is that a reliable mechanistic dynamic model is not available, but a static process model is at hand. The HRTO is made possible by using an approximate dynamic model that takes advantage of the static process model and identified linear dynamics from the plant in a Hammerstein structure. Three models are proposed based on the Hammerstein structure. These models are used in the dynamic observer, a proposed variation of an Extended Kalman Filter (EKF), and as the controller’s internal model. The economic objectives are introduced into the control layer by the self-optimizing variables in an adaptive infinite-horizon MPC formulation. The framework presents full model compatibility between the observer, controller, and optimizer layers. A validation case study is developed in the Williams–Otto reactor with two proposed EKF tunings. The open-loop results provide evidence that the proposed Hammerstein structure is adequate as an approximate dynamic model, preserving the observability characteristics of the static model. The closed-loop results show that our framework outperforms the classic RTO structure in economic return, especially in the transient regions. Moreover, the proposed approach has a very natural way of handling active constraint changes. This effect is shown in the results at the moment that a constraint becomes active. The economic performance of the RTO is impaired compared to our proposed HRTO scheme. Finally, the average computational cost of each iteration of our framework is twice as fast as the classic RTO framework, which suggests the potential applicability of the proposed methodology on an industrial scale.
中文翻译:
在没有动态机械模型的情况下使用瞬态测量进行稳态实时优化:与自适应自优化 IHMPC 集成的 HRTO 框架
在动态缓慢或受到频繁干扰的过程中,稳态操作的检测可能很少见,这阻碍了经典 RTO 的应用。为了克服这个问题,混合 RTO (HRTO) 是一种提议,其中动态观察器替代了稳态检测 (SSD) 和静态参数估计步骤。最近在 HRTO 框架方面取得了进展。尽管如此,所有这些都是从一个可靠的机械动力学模型可用的假设开始的,这在许多应用中并不正确。事实上,大多数典型的 RTO 设计项目都没有考虑开发动态过程模型。因此,目前的工作提出了一个 HRTO 框架,主要是为了克服第一个假设。我们提出了一个完整的控制框架,其中的基本假设是可靠的机械动力学模型不可用,但手头有一个静态过程模型。HRTO 是通过使用近似动态模型实现的,该模型利用静态过程模型和从 Hammerstein 结构中的工厂识别的线性动态。基于 Hammerstein 结构提出了三种模型。这些模型用于动态观测器、扩展卡尔曼滤波器 (EKF) 的提议变体,并用作控制器的内部模型。经济目标通过自适应无限范围 MPC 公式中的自优化变量引入控制层。该框架在观察者、控制器和优化器层之间提供了完整的模型兼容性。在威廉姆斯-奥托反应器中开发了一个验证案例研究,其中包含两个建议的 EKF 调谐。开环结果证明所提出的 Hammerstein 结构足以作为近似动态模型,保留静态模型的可观察性特征。闭环结果表明,我们的框架在经济回报方面优于经典的 RTO 结构,尤其是在瞬态区域。此外,所提出的方法具有处理主动约束变化的非常自然的方式。这种效果在约束变为活动时的结果中显示。与我们提议的 HRTO 计划相比,RTO 的经济表现受到了损害。最后,我们框架每次迭代的平均计算成本是经典 RTO 框架的两倍,


























 京公网安备 11010802027423号
京公网安备 11010802027423号