Sensors and Actuators A: Physical ( IF 4.1 ) Pub Date : 2021-08-31 , DOI: 10.1016/j.sna.2021.113064 Yang Zhang , Yangyang Ma , Xiao Yu , Pengfei Wang , Hao Lv , Fulai Liang , Zhao Li , Jianqi Wang
|
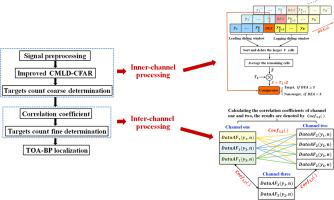
Radar-based life detecting technology has been researched more and more in recent years and applied widely in several areas. However, few researches on multi-subjects detecting and locating have been reported. Even these researches are mainly based on imaging technology with two shortcomings, namely the interference of ghost and difficult to focus the target’s position. A new coarse-to-fine approach for detecting and locating of human targets using single-input multiple-output (SIMO) radar under penetration conditions is proposed. The approach realized automatic recognition and localization of human subjects without any prior information, such as target count. Firstly, an improved censored mean level detector constant false alarm rate (CMLD-CFAR) by adding a feature to distinguish vital sign from background is proposed in each inner-channel to coarsely determine the targets’ time-of-arrival (TOA) distances. Secondly, the real targets count is finely determined by calculating the inter-channel Pearson correlation coefficient of signals from different channels. Then, a back projection (BP) is presented to calculate the targets’ 2-D locations. In the experiments of single and multi-target locating, all targets were identified correctly and localized near their actual positions with errors within 0.3 m. With the distinctive telescopic structure of the proposed radar, the azimuth resolution of locating is adjustable. Compare to current radar system for radar multi-target locating, like multiple-input multiple-output (MIMO) system, the proposed system can improve accuracy and automation of localization while decline the cost and complexity. It has potential to promote practical application of locating trapped human targets in post-disaster rescue and intelligent homeware fields.
中文翻译:
使用新型伸缩式 SIMO UWB 雷达在穿墙条件下对多个人体对象进行粗到细检测和定位
近年来,基于雷达的生命探测技术得到了越来越多的研究,并在多个领域得到了广泛的应用。然而,关于多主体检测和定位的研究鲜有报道。即使这些研究也主要基于成像技术,但存在重影干扰和目标位置难以聚焦两大缺陷。提出了一种新的粗到细方法,用于在穿透条件下使用单输入多输出 (SIMO) 雷达检测和定位人体目标。该方法无需任何先验信息,例如目标计数,即可实现对人体主体的自动识别和定位。首先,通过在每个内部通道中添加一个特征来区分生命体征和背景,提出了一种改进的删失平均水平检测器恒定误报率(CMLD-CFAR),以粗略地确定目标的到达时间(TOA)距离。其次,通过计算不同通道信号的通道间皮尔逊相关系数来精细确定真实目标计数。然后,提出了一个反投影(BP)来计算目标的二维位置。在单目标和多目标定位实验中,所有目标都被正确识别并定位在其实际位置附近,误差在0.3 m以内。该雷达具有独特的伸缩结构,定位方位分辨率可调。与现有的雷达多目标定位雷达系统相比,与多输入多输出(MIMO)系统一样,所提出的系统可以提高定位的准确性和自动化,同时降低成本和复杂性。它具有促进定位被困人员在灾后救援和智能家居领域的实际应用的潜力。









































 京公网安备 11010802027423号
京公网安备 11010802027423号