International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2021-08-24 , DOI: 10.1016/j.ijmachtools.2021.103796 Michael Neubauer 1 , Felix Brenner 1 , Christoph Hinze 1 , Alexander Verl 1
|
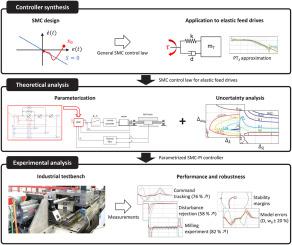
The precision of machine tools is essentially determined by the feed drive control. To improve the dynamic behavior of elastic feed drives, this paper presents a novel position control concept, substituting the conventional P position controller of the industrial cascade control with a continuous sliding mode controller (SMC) together with a Kalman Filter for state estimation. The novelty of this approach lies in the focus on practical applicability: The underlying PI-cascade structure leads to low commissioning effort and the SMC controller’s parameterization is simplified to a single tuning parameter. A general compliant feed drive model is used as plant, whose parameters usually are already known from commissioning of the velocity controller. The SMC position controller is derived analytically and its stability and damping properties are investigated for the dominating mechanical mode for uncertainties of the model parameters and a wide range of controller gains. The effectiveness of the SMC-PI controller is validated for an industrial ball screw feed drive. Extensive experimental results show a considerable decrease of tracking errors in command tracking, disturbance rejection and for a high speed cutting (HSC) milling experiment compared to P-PI cascade control, while stability margins remain almost independent of the controller gains. The parameterization is discussed on the basis of a theoretical analysis and measuring results. Furthermore, excellent robustness properties regarding model errors are demonstrated.
中文翻译:
级联滑模位置控制 (SMC-PI) 可改善弹性进给驱动器的动态行为
机床的精度主要由进给驱动控制决定。为了改善弹性进给驱动器的动态行为,本文提出了一种新颖的位置控制概念,将工业级联控制的传统 P 位置控制器替换为连续滑模控制器 (SMC) 以及用于状态估计的卡尔曼滤波器。这种方法的新颖之处在于注重实际适用性:底层 PI 级联结构可降低调试工作量,并且 SMC 控制器的参数化被简化为单个调整参数。通用的兼容进给驱动模型被用作工厂,其参数通常从速度控制器的调试中已知。SMC 位置控制器是通过分析推导出来的,并且针对模型参数的不确定性和控制器增益范围很广的主要机械模式,研究了其稳定性和阻尼特性。SMC-PI 控制器的有效性已针对工业滚珠丝杠进给驱动进行了验证。大量实验结果表明,与 P-PI 级联控制相比,命令跟踪、干扰抑制和高速切削 (HSC) 铣削实验中的跟踪误差显着减少,而稳定性裕度几乎与控制器增益无关。在理论分析和测量结果的基础上讨论了参数化。此外,还展示了关于模型误差的出色鲁棒性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号